|
|
|
|
|
FME文章荐读|基于机器学习的机构运动学分析与综合方法综述 |
|
|
论文标题:Review on machine learning-based approaches for the kinematic analysis and synthesis of mechanisms
期刊: Frontiers of Mechanical Engineering
作者:Xu HAN, Ping ZHAO, Xiran ZHAO, Bin ZI
发表时间: 15 Apr 2025
DOI: 10.1007/s11465-025-0827-5
微信链接:点击此处阅读微信文章
运动学分析与综合是机构学研究的两个关键课题,也是机构设计和控制实际应用的重要基础。机器学习(ML)作为一种数据驱动的方法,能够在避免复杂解析与数值计算的前提下,实现对各类机构的运动学分析与综合。
《Frontiers of Mechanical Engineering》2025年第20卷第2期的一篇题为“Review on machine learning-based approaches for the kinematic analysis and synthesis of mechanisms”的综述论文,系统总结了机器学习算法及不同数据表示方式在机构运动学分析与综合中的应用。回顾并简要分析了当前基于机器学习的串联机构与并联机构运动学分析方法,以及相应的运动综合研究进展。对单一神经网络、模块化神经网络及混合神经网络在机构运动学中的应用优势进行了比较与讨论,并展望了机器学习与机构运动学未来的融合方向及其面临的潜在挑战。
文章简述了机构运动学分析与综合中广泛使用的机器学习算法。介绍了多层感知机(MLP)、径向基函数(RBF)网络、卷积神经网络(CNN)、变分自编码器(VAE)、生成对抗网络(GAN)和递归神经网络(RNN)等算法框架。MLP和RBF主要用于直接解决运动学分析中的回归问题,CNN和VAE在机构综合中对特征提取和潜在空间表示起重要作用,GAN可生成新样本来解决机构问题,同时还介绍了三种循环神经网络的模型框架。
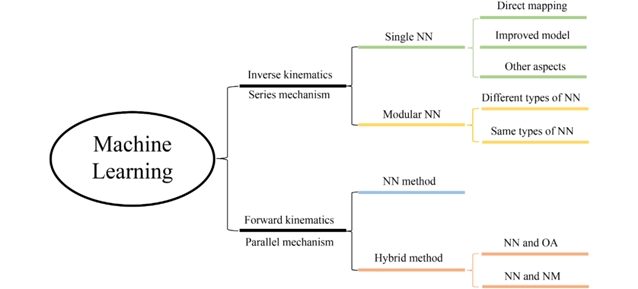
串联机构中机械臂应用广泛,其逆运动学(IK)求解困难,传统解析法和数值法存在不足,而机器学习方法核心是构建从机械臂末端位姿空间到关节空间的映射关系。主要应用形式有单神经网络模型和模块化神经网络模型。单神经网络在串联机械臂IK中应用广泛,可解决速度、精度和奇异性等问题,包括直接映射、改进模型和其他关键问题解决等方面。模块化神经网络将多个子神经网络组合,具有融合不同领域知识、整合不同网络特点和优势、解决多个相似问题等优点,其架构多基于研究者先验知识,分为不同类型和相同类型神经网络的模块化。
并联机构相比串联机构有诸多优势,其正向运动学(FK)涉及高度耦合非线性方程,求解困难,而逆运动学较易,故该部分聚焦ML在并联机构FK中的应用。神经网络方法通过训练学习关节空间到末端位姿空间的直接映射,可解决多解和奇点等问题,无需复杂机构分析和公式推导,且有多种算法应用,但精度常不足,可通过循环迭代策略等提高。混合方法包括与数值方法(NM)和启发式优化算法结合,NM可提高FK求解精度,优化算法可优化神经网络参数,提高求解精度,但网络模型参数数量不能过多。
运动学综合是以特定轨迹为目标、约束为辅,设计和优化机构的过程,本质是运动学分析的逆过程,为多目标优化问题,传统方法耗时,而ML应用部分解决了该问题。应用ML于运动学综合的关键是将机构和轨迹嵌入网络,机构表示需满足从设计空间充分均匀采样和将运动特征嵌入ML算法的条件,有参数向量和可编辑序列等表示方法;轨迹有坐标集、系数向量和图像等表示方法。
机器学习在机构运动学分析中很有价值,未来需探索其与机构运动学理论的结合。机构独特性质给ML应用带来挑战,文章列出了三个关键问题:机构构型的强离散性,需找到不同构型的通用数字化表示方法并嵌入网络;网络模型训练耗时,需提高其在同类不同尺度机构中的泛化性能;需明确神经网络内部映射过程及所得特征在机构中的影响,提高模型可解释性。
关键词
机器学习;运动学分析;串联机构;并联机构;运动学综合
引用
Xu HAN(韩旭), Ping ZHAO(赵萍), Xiran ZHAO(赵熙然), Bin ZI(訾斌). Review on machine learning-based approaches for the kinematic analysis and synthesis of mechanisms. Front. Mech. Eng., 2025, 20(2): 11 https://doi.org/10.1007/s11465-025-0827-5

扫描二维码阅读原文
精彩推荐
1.FME文章荐读 | 变工况下轴承故障诊断的基于加权DJP-MMD的深度迁移度量学习方法
2.FME文章速览 | 通过新型自适应关节和协同策略增强多移动机器人协同搬运系统的地形适应性
3.FME文章速览 | 用于具有可编程磁排列柔性致动器的多材料磁场辅助增材制造系统
4.FME文章速览 | 高速行星探测车的设计方法、综合与控制策略
5.FME文章荐读 | 冰壶比赛中新型六足冰壶机器人投掷冰壶的分析与解决方案
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






