|
|
|
|
|
抗干扰!这项研究让无人飞行器目标跟踪更稳、更准、更强? Engineering |
|
|
论文标题:Dynamic Target Tracking of Unmanned Aerial Vehicles Under Unpredictable Disturbances
期刊:Engineering
DOI:https://doi.org/10.1016/j.eng.2023.05.017
微信链接:点击此处阅读微信文章
湖南大学王耀南教授团队在《Engineering》发表了题为“Dynamic Target Tracking of Unmanned Aerial Vehicles Under Unpredictable Disturbances”(无人飞行器在不确定扰动下的动态目标跟踪)的研究论文,提出了一种基于速度观测器的动态视觉伺服方法,以提高无人飞行器在不可预测干扰下的跟踪性能。福州大学陈彦杰博士为第一作者,湖南大学王耀南教授为通讯作者。
无人飞行器(UAVs)凭借高机动性能在航空摄影和巡逻检查等领域广泛应用,其自主控制依赖位置、速度和姿态信息反馈,鉴于 GPS 在恶劣环境下的局限性,视觉技术成为无 GPS 信号环境下获取位置信息的重要手段,基于视觉的控制方法也在无人飞行器各领域得以广泛应用。其中,视觉伺服方法分为基于位置的视觉伺服(PBVS)和基于图像的视觉伺服(IBVS),因 IBVS 对硬件算力需求低且对图像噪声和相机参数有鲁棒性,被广泛用于控制器设计。在 IBVS 方法中,平移速度是关键,基于图像的速度观测器成为估计平移速度的有效方式。近期,IBVS 方法拓展到复杂目标跟踪任务,但现有方法存在依赖速度测量、受目标旋转影响图像深度估计等问题。同时,无人飞行器在复杂干扰环境中的抗干扰能力关乎目标跟踪稳定性,虽已有部分抗干扰控制方法实现稳定控制,但仍存在依赖速度测量等局限。因此,无 GPS 环境下的平移速度测量、旋转目标的图像深度估计以及外部干扰下的视觉伺服目标跟踪控制,是无人飞行器视觉控制研究亟待解决的关键问题 。
基于上述问题,无人飞行器IBVS控制面临的主要挑战包括:①被跟踪目标的平移速度估计,②动态旋转目标的图像深度估计,以及③在不确定的外部干扰下的跟踪稳定性。
为了解决这些挑战,研究团队进一步改进了针对无人飞行器的IBVS方法,以保证其能够应对不可预测的目标速度、动态旋转目标带来的不确定性以及动态目标跟踪控制中的外部干扰。
该研究的主要贡献总结如下:
提出了一种新颖的图像深度模型,并构建了图像动力学。利用所提出的图像深度模型,可以在不需要被跟踪目标旋转信息的情况下准确估计图像深度。保证了无人飞行器可以稳定跟踪具有任意方向动态旋转的目标。
设计了一种速度观测器,保证了无人飞行器能够在无GPS环境中准确估计与动态目标之间的相对速度。通过对相对速度的估计有效降低了由于测量速度中的噪声干扰引起的控制抖动现象,从而提高了无人飞行器的作业稳定性。
设计了一种积分滤波器来估计不可预测的外部干扰(包括动态目标的加速度和环境干扰)。这有效提高了无人飞行器在处理动态目标的未知运动和外部干扰时的干扰抑制能力。
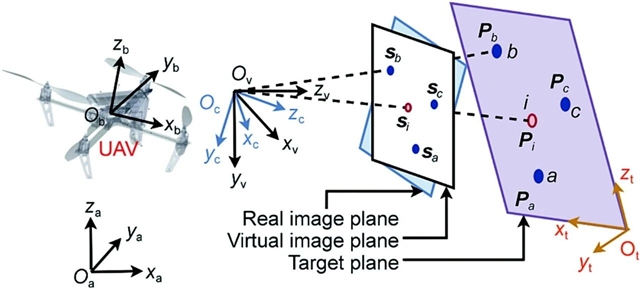
图1 无人飞行器系统的参考坐标系。
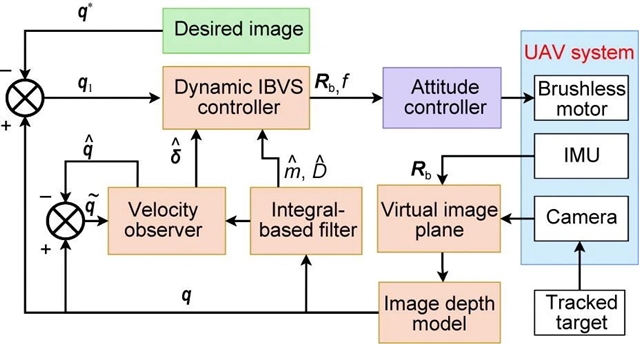
图2 文章所提出的视觉伺服控制方案架构。
研究团队通过多阶段对比仿真和实验验证了所提出的动态视觉伺服方法的有效性和鲁棒性。
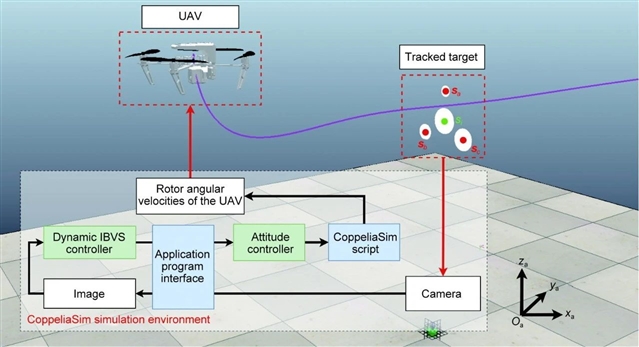
图3 用于跟踪性能对比的CoppeliaSim仿真环境。
在视觉定位阶段,当激活视觉伺服控制器时,无人飞行器在5 s内收敛到期望位置,并在跟踪目标后方约1 m处悬停。相对速度估计误差

收敛至0附近,并保持在±0.05 m/s范围内。定位误差和图像误差分别保持在±0.1 m和±10 pixel范围内。外界干扰的估计上界收敛于1.1 N附近。图像深度误差保持在±0.02 m以内。
在目标跟踪阶段,移动机器人沿给定轨迹移动,无人飞行器开始跟踪目标。由于被跟踪目标的加速度未知,无人飞行器的跟踪误差限制在±0.15 m以内。相对速度和图像深度的估计误差分别保持在±0.05 m/s和±0.02 m以内。得益于准确的速度估计,无人飞行器能够稳定地进行动态目标跟踪。
在干扰跟踪阶段,无人飞行器进入干扰区域。由于干扰的影响,外界干扰的估计上界值增加并收敛至1.35 N。图像深度的估计误差收敛至±0.06 m以内的有界值。通过补偿基于积分的滤波器,无人飞行器能够保持稳定,并将跟踪误差维持在±0.2 m以内。
在干扰定位阶段,当被跟踪目标停止移动时,无人飞行器停止跟踪。无人飞行器在干扰下悬停,并保持与目标1 m的距离。虽然无人飞行器的跟踪误差相比视觉定位阶段有所增加,但无人飞行器仍然以稳定的姿态悬停,并保持±0.2 m以内的定位精度。
总的来说,所提出的视觉伺服方法在GPS信号受限环境中保证无人飞行器对动态目标的有效跟踪。利用所提出的视觉伺服方法,可以减轻由外部干扰和跟踪目标的动态旋转所产生的控制不确定性对控制系统的影响。
在未来的研究中,研究团队将把所提出的动态视觉伺服方法用于无人飞行器的实际应用场景,如捕捉动态目标和自主着陆。
论文信息:
Yanjie Chen, Yangning Wu, Limin Lan, Hang Zhong, Zhiqiang Miao, Hui Zhang, Yaonan Wang. Dynamic Target Tracking of Unmanned Aerial Vehicles Under Unpredictable Disturbances. Engineering, 2024, 35(4): 74–85
开放获取:
https://doi.org/10.1016/j.eng.2023.05.017
更多内容
新研究提出群体交互场概念,助力无人系统理解行人意图
北航向锦武院士团队研发直升机驾驶机器人 推动有人飞行器无人化进程
天空中的创新:无人机驱动的工程巡检取得突破
Engineering青年编委招募
Engineering征稿启事:人工智能赋能工程科技
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






