生命科学
|
医学科学
|
化学科学
|
工程材料
|
信息科学
|
地球科学
|
数理科学
|
管理综合
站内规定
|
手机版
首页
|
新闻
|
博客
|
院士
|
人才
|
会议
|
基金·项目
|
论文
|
绘图
|
视频·直播
|
小柯机器人
|
医学科普
头 条
更多>>
直播预告丨脑机接口、储能等风口专业要不要冲
今晚19点特邀天津大学医学院副院长杨佳佳、南京航空航天大学人工智能学院具身智能系主任季家欢和华北电力大学能源动力与机械工程学院教授巨星,与网友畅聊高考专业如何报考。
王东光:以光为引,深耕太阳磁场观测之路
30多年来,中国科学院国家天文台正高级工程师王东光深耕太阳磁场测量研究,攻克多项核心技术,推动我国相关观测实现从地面到空间、从间接探测到直接探测的跨越。
要 闻
更多>>
·
RNA修饰m6A调控绣球菌菌丝生长的表观调控机制
·
直播预告丨交叉学科遍地开花,选专业如何不踩雷?
·
2027年度广东省自然科学基金项目形式审查结果公布
·
华南理工大学土木与交通学院教授汪益敏逝世
·
贵州省科技厅公示一批项目验收结果
·
王忠义任哈尔滨工程大学党委常委
·
宁波东方理工大学公布今年本科新生学费减免政策
·
2026年湖北省创新型产业集群绩效评价复评专家公示
·
山东省自然科学基金集中申报项目拟立项结果公示
科学家识别出来自黑洞碰撞的引力波信号
新闻图集
未来数十年南极变化可预测
研究揭示:精神疾病之间可能存在基因共性
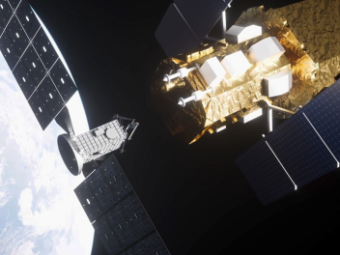
要坠落?NASA机器人紧急上天救援
科报深度
更多>>
·
团魂?!螨虫亿年前已“排队”出行,用丝线互系...
·
给手指装上“电子皮肤”
·
全球顶尖科学家流动格局正在重塑
·
200年前“存争议”的光斑,撬动未来光存储技术
·
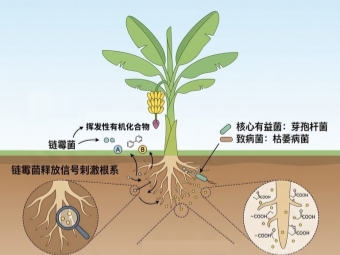
全程“贴身管家”:技术指导助力小麦亩产纪录再...
·
把化学反应“关”进纳米笼子
国 际
更多>>
·
下一代数据库技术展现大幅减少AI“幻觉”潜力
·
科学家识别出黑洞并合产生的直接引力波
·
12人将被困北极冰层8个月,只为科学探索
·
美企发射“星落”返回舱,演示再入返回技术
·
《自然》将“注册报告”论文形式扩展至覆盖全部...
·
模块化设计的纳米递药机器人能自行组装
高 校
更多>>
·
华南理工大学土木与交通学院教授汪益敏逝世
·
王忠义任哈尔滨工程大学党委常委
·
宁波东方理工大学公布今年本科新生学费减免政策
·
高校密集成立新学院,对考生高考志愿填报有什么...
·
用AI查AI率靠谱吗?毕业论文检测怎样更科学
·
山东大学校长:不求一蹴而就之功 常守滴水穿石...
科 普
更多>>
·
全球升温扰乱动物大脑认知
·
顾方舟:选择活疫苗背后的“三笔账”
·
肽注射热潮背后暗藏隐忧
·
听南极考察队员讲述科考难忘瞬间
·
追忆“糖丸爷爷”:以身试药彰显一代科学家的使...
·
“本源悟空”完成超100万个全球量子计算任务
生命科学
6年零发表,这位北大博后一出手就是“...
全细胞生物传感器阵列斩获日内瓦发明...
我国濒危物种与生物多样性保护领域开...
深海里的“绝食冠军”来啦——吃一顿...
医学科学
新型深脑刺激系统改善帕金森患者步态
免疫“种子细胞”在癌症模型中取得良...
理性看待“逆转衰老”热潮
研究揭示:精神疾病之间可能存在基因...
化学科学
科研人员揭示锂硫电池微观反应“黑箱...
研究揭示钴基析氧催化剂活性位动态生...
我国科学家揭示钾助剂的活性氢新机制
科学家在高透明聚酰胺弹性体研究方面...
工程材料
直播回放丨解锁发光材料的“变色密码...
中欧“微笑”卫星进入科学观测轨道 ...
钟训正:他设计了“国民网红建筑”
新型三维光纤微镊面世
科报快讯
更多>>
·
绝经后,卵巢可能转变为具有免疫功能的器官
·
斑马鱼out了,10亿美元投入小丹鱼为模式生物
·
第四届链博会“内地—香港创科合作交流会”举行
·
科学家识别出来自黑洞碰撞的引力波信号
·
新研究提出稻田重金属污染风险管控新框架
·
绣球花的蓝色源于铝超积累!科学家发现背后玄机
动态
更多>>
·
杨国安新书《智在未来》发布:AI落地路线图
·
AI深入业务腹地,科大讯飞发布企业服务Claw平台
·
将样本放大10亿倍,普通显微镜也能精准定位氨基...
·
河北地质大学古建智能预警系统实现市场化落地
·
天大作品入选“新时代·新影像”中外联合创作计划
·
研究首次系统提出棉花多目标协同栽培框架
院 所
更多>>
·
王东光:以光为引,深耕太阳磁场观测之路
·
孙燕辉:老船长的深海征途
·
江门中微子实验发现中微子质量顺序倾向于正序的...
·
全细胞生物传感器阵列斩获日内瓦发明金奖
·
基金委交叉科学部召开青年科学基金项目评审会
·
我国濒危物种与生物多样性保护领域开拓者汪松逝...
观 点
更多>>
·
复旦张军:不要押注在“上岸”,要敢闯荡不一样...
·
已然破“四唯”,且看如何立新标
·
智谱等中国大模型何时达到Fable级别水平?
·
徐宗本:数学是创新的源头活水和关键生产力
·
专访丘成桐:基础研究要给从0到1留有空间
·
姚檀栋:以加强基础研究打牢科技强国建设根基
信息科学
下一代数据库技术展现大幅减少AI“幻...
模块化设计的纳米递药机器人能自行组...
光镊有了永不疲倦的机器人操作员
AI时代,统一智能平台将是大学运行的...
地球科学
全球升温扰乱动物大脑认知
刚领完国际气象组织奖,他就把奖金全...
12人将被困北极冰层8个月,只为科学...
破译树木年轮里的气候密码
数理科学
科学家识别出黑洞并合产生的直接引力...
王东光:以光为引,深耕太阳磁场观测...
江门中微子实验发现中微子质量顺序倾...
陆雅翔:在“钠”场马拉松里,不设限
管理综合
RNA修饰m6A调控绣球菌菌丝生长的表观...
直播预告丨交叉学科遍地开花,选专业...
直播预告丨脑机接口、储能等风口专业...
2027年度广东省自然科学基金项目形式...
每日全部新闻
一周新闻排行
1
中国博士后科学基金第79批面上资助...
2
武汉大学领导班子调整
3
王树国:“学会数理化,走遍天下都...
4
他们用10年破解作物“午睡” 百年谜...
5
电动飞机要起飞,先得算清这笔“能...
6
轻夸克希格斯相互作用研究取得新进...
7
何亚琼任南京航空航天大学党委书记
8
中国海洋大学与南京信息工程大学签...
9
新方法预测晶体管缩小的物理极限值
10
直播回放|2026年中国科学院大学毕业...
新闻专题
更多>>
2026北京科学传播大赛 科学演讲赛道
2026北京市最美科技工作者
中国科学院杰出科技成就奖
2026两会科教观察
《中国科学报》
电子版
2026-6-25
1
2
3
4
科学网电子杂志
每周免费
友情链接
中国科学院大学
|
中国人教育网
美国LetPub专业编辑
中国医院科技影响力排行
意得辑
查尔斯沃思
AJE作者服务