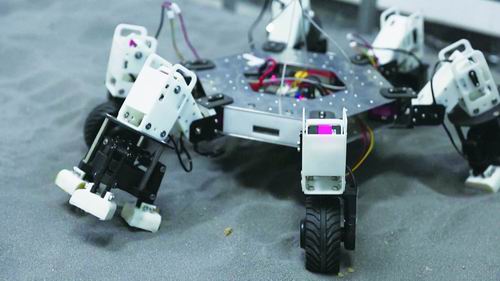
近日,我国首台太空采矿机器人在中国矿业大学诞生。与时下火爆的人形机器人、机器狗等不同,太空采矿机器人的基本形态为六足模式,有3个轮足和3个爪足,这种设计能够使机器人适应太空中的微重力环境。
为了解决失重带来的漂移问题,科研团队模拟昆虫的爪刺结构,为太空采矿机器人设计了特殊的阵列式的爪刺。微重力环境下,它的附着能力更强、抓地能力更强,既能够固定住进行采样,又能够根据地形进行移动。机器人足末端有车轮和锚固结构两种配置,可以在小行星坑洼不平的地面上行走。图片来源:视觉中国
《中国科学报》 (2025-03-19 第1版 要闻)






