|
|
|
|
|
学术+产业双视角看人形机器人:从实验室到工厂,到底差在哪? |
|
|
近日,杭州师范大学李文娟、浙江大学智能教育研究中心吴吉义等学者在ENGINEERING Information Technology & Electronic Engineering期刊上发表了题为“A comprehensive review on humanoid robots: perspectives from academia and industry”的最新综述,同时作为封面论文发表。该综述首次系统性结合学术研究洞见与产业发展分析,为致力于研发能力更强、成本更低、社会融合度更高的人形机器人的研究人员、工程师和政策制定者们提供了宝贵指导。
综述背景
人形机器人作为人工智能与机器人技术深度融合的代表性方向,正经历从实验室原型到产业化落地的关键跃迁。Tesla Optimus、Boston Dynamics Atlas、宇树H1、优必选Walker S等明星产品相继亮相,2024年全球人形机器人领域披露融资规模已超过60亿美元,相比2020年的约5亿美元增长十余倍。与此同时,大语言模型与基础模型的崛起,为人形机器人的具身智能注入了全新动能。OpenVLA、Open X-Embodiment、Octo等跨本体学习框架的出现,正在重塑这一领域的技术格局。
然而,研究团队在系统梳理已有文献时发现,现有综述存在三个突出局限:
(1)视角单一。多数综述聚焦特定技术模块(如机器人头部、驱动器、控制算法)或特定应用场景(如医疗、救援),缺乏对人形机器人作为一个系统性产物的整体把握。
(2)学术与产业割裂。现有综述通常以学术研究为主线,理论进展和实验原型被反复论述,但对Tesla、Boston Dynamics、优必选、智元、傅利叶智能等代表性企业的工程化进展、技术规格、市场定位缺乏系统性的横向对比。这种“学术偏倚”使读者难以判断技术成熟度与产业落地之间的真实差距。
(3)缺乏挑战—对策的闭环框架。大量文献停留于“罗列研究”,未能深入剖析技术瓶颈背后的成因,更鲜有针对性的可行路径建议。
基于上述判断,团队历时一年,系统检索了IEEE Xplore、ACM、Springer、ScienceDirect等主流数据库(2000—2025年),重点追踪了ICRA、RSS、CoRL等顶会近十年成果,特别覆盖2024–2025年具身智能领域的最新里程碑工作及真实环境中的人形机器人学习成果,并结合12款代表性商业产品的深度调研(涵盖技术白皮书、专利文献、行业报告),最终汇集形成约300篇核心文献的语料库,撰写了这篇双视角综述。
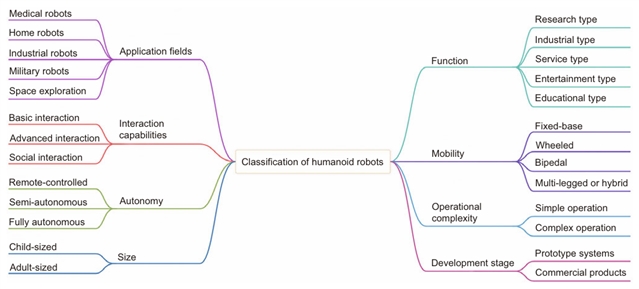
图1.人形机器人的分类
综述的核心贡献
(1)首次提出学术—产业双视角分析框架。同时从理论研究与产业实践两个维度系统考察人形机器人,揭示二者之间的技术转化障碍、协同模式与互补价值。论文中的雷达对比图量化呈现了双方差异:学术界在算法创新(70%–80%资源投入算法)、风险承受、开放协作上具有显著优势;产业界则在硬件投入(30%–40%资源投入制造工艺)、可靠性测试(MTBF超过10000小时vs学术原型100–1000小时)、技术成熟度(TRL 8–9 vs学术TRL 3–4)上更具实力。
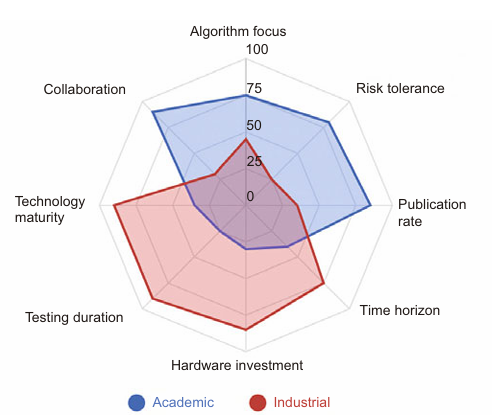
图2.学术和产业贡献的比较图
(2)系统性比较12款代表性商业产品。涵盖国际厂商Tesla Optimus / Optimus Gen2、Boston Dynamics Atlas、Agility Robotics Digit、1X Technologies NEO、Engineered Arts Ameca,以及中国厂商小米CyberOne、优必选Walker系列、智元RAISE A1/A2、宇树H1/G1/H2、傅利叶GR-1/GR-2、众擎机器人SE01、逐际动力CL-1、加速进化Booster T1等 20 余款产品(含变体),从身高、重量、自由度、速度、负载、应用领域等维度提供细致的横向对比,填补现有综述空白。
(3)构建系统化“挑战—对策”方法论。识别出六大挑战类别(硬件设计、控制系统、感知认知、人机交互、应用需求、伦理问题),并配套提出七大未来研究方向,形成可操作的研究路线图。
(4)系统剖析大语言模型与基础模型对人形机器人的变革性影响。涵盖RT-1/RT-2、PaLM-E、OpenVLA、Open X-Embodiment、Octo等前沿成果。论文同时指出实时性、安全性、可解释性等关键挑战。
核心内容亮点
(1)八维分类框架
综述提出了人形机器人的八维分类体系:功能、应用领域、移动方式、交互能力、操作复杂度、自主性、尺寸、发展阶段。这一框架为研究者和工程师提供了结构化的认知地图。
(2)关键技术四层架构
将人形机器人关键技术整合为四层递进架构:本体结构层(驱动器、传感器、电源),感知与认知层(视觉、触觉、多传感融合),控制与运动层(传统控制如 ZMP 零力矩点、优化控制、学习型控制),交互层(自然语言处理、情感计算、多模态人机交互)。
(3)识别六大核心挑战
硬件系统设计:驱动器约占整机成本55%–60%,能源密度受限,大模型本地部署面临GPU功耗(200–300 W)与机器人电池容量(1–2 kWh)的硬约束。
控制系统复杂性:实时控制需100–1000 Hz、响应1–10 ms,而LLM推理常需数秒,时间尺度严重错配。
感知与认知瓶颈:多传感融合的时空对齐难题,深度学习算力与实时性矛盾,语义理解与因果推理不足。
人机交互困境:多模态融合处理、情感表达自然性、跨文化适配性。
应用场景多样性:极端环境适应、成本控制、环境鲁棒性。
伦理与社会影响:制造装配岗位20%–30%替代风险、仓储物流40%–50%、双重用途隐忧、法律责任界定、算法偏见与隐私。
(4)真实部署的“最后一公里”困境
综述突破性地引入两个真实部署案例,用一手数据揭示实验室与商业落地之间的真实鸿沟。
NAO机器人在自闭症儿童治疗中的应用:单台成本1.5万–2万美元,每周需要专业维护,80%–90%的有效干预仍依赖人类治疗师协助。
Boston Dynamics Spot在新冠医院的部署:尽管初期降低了医护人员暴露风险,但红外测温精度不足(±0.5°C 偏差)、室内复杂环境导航失败率20%–25%、约30%老年患者对机器人感到不适。74500美元单价加25000–35000美元医疗设备整合成本令多数医院望而却步。
这些案例警示业界:人形机器人产业化需要正视技术演示与可持续部署之间的巨大鸿沟。
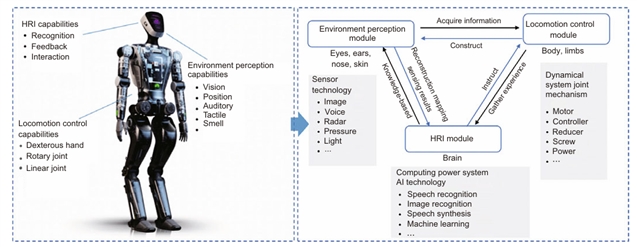
图3.人形机器人主要功能模块及关键技术
未来展望
综述将人形机器人的发展轨迹划分为三个时间窗口:
近期(1—3年):驱动器效率与成本将迎来渐进式改善,仓储物流、汽车制造等结构化场景将出现限量商业部署。基础模型与人形机器人的融合将显著提升自然语言交互能力,全身控制的进步将改善结构化地形上的运动稳定性。
中期(3—5年):多机器人协同框架与自适应学习算法将取得重大突破,机器人将逐步进入半结构化环境,包括医疗机构和服务业。模块化设计与标准化将带动成本下行,推动更广泛的市场采用。
长期(5—10年):具身智能、神经形态计算与先进材料的融合,将催生真正能在复杂非结构化环境中自主作业的人形机器人。从养老照护到灾害救援,人形机器人的大规模部署将随技术成熟度提升和成本接近消费级而成为可能。
综述提出的七大研究方向——协同智能与多机器人系统、自主性与智能性提升、环境适应与运动能力扩展、人机交互与情感表达优化、应用领域多元化、技术基础设施与成本优化、安全与伦理问题——将共同支撑这一进程。
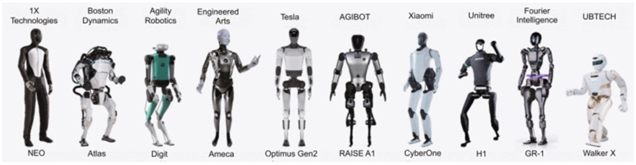
图4.人形机器人代表产品
与国家重大战略的关联
人形机器人产业的发展,深度契合我国多项国家重大战略部署。
(1)与“制造强国”战略和新型工业化深度契合。2023年11月,工业和信息化部印发《人形机器人创新发展指导意见》,明确提出“到2025年,我国人形机器人创新体系初步建立……整机产品达到国际先进水平,并实现批量生产”,“到2027年,我国人形机器人技术创新能力显著提升,形成安全可靠的产业链供应链体系”的目标。本综述对智元RAISE A1、优必选Walker S1等本土产品的系统分析,正是对这一国家战略落地进程的真实记录与深入诊断。
(2)服务“新质生产力”培育。人形机器人作为人工智能、高端制造、新材料、新能源等多领域技术融合的集成性产品,是发展新质生产力的标志性载体。综述提出的具身智能、神经形态计算、跨本体学习等前沿方向,与新质生产力强调的“原创性、颠覆性科技创新”高度对应。
(3)响应“积极应对人口老龄化”国家战略。综述详细讨论了人形机器人在养老照护、医疗康复、家庭服务中的应用前景,傅利叶智能GR-2等产品代表了这一方向的产业化探索。在我国60岁及以上人口已达约2.97亿(国家统计局2023年数据)的背景下,这一方向的战略意义尤为突出。
(4)支撑《新一代人工智能发展规划》落地。2017年国务院发布的《新一代人工智能发展规划》将“智能机器人”列为重点突破方向。综述对大模型与机器人融合(OpenVLA、Open X-Embodiment、RT-2等)的系统梳理,为我国在具身智能赛道实现弯道超车提供了重要参考。
(5)助力“科技自立自强”目标。综述指出,当前关节驱动器、高性能传感器、专用AI芯片等核心部件仍面临供应链单点风险——驱动器占整机成本55%–60%,且高扭矩密度型号常依赖单一供应商。这一发现为我国突破“卡脖子”环节、构建自主可控的人形机器人产业链提供了清晰的问题导向。
(6)契合“十四五”机器人产业发展规划。2021年工信部等十五部门联合印发的《“十四五”机器人产业发展规划》提出“成为全球机器人技术创新策源地”的愿景。综述对学术—产业协同模式(如Open X-Embodiment联合22家学术机构与12家产业机构的成功范例)的深入剖析,为我国构建产学研协同创新生态提供了可借鉴的国际经验。
价值概述
本综述对不同读者群体的核心价值如下:
(1)核心定位:首篇系统性融合学术前沿与产业落地的双视角人形机器人综述。
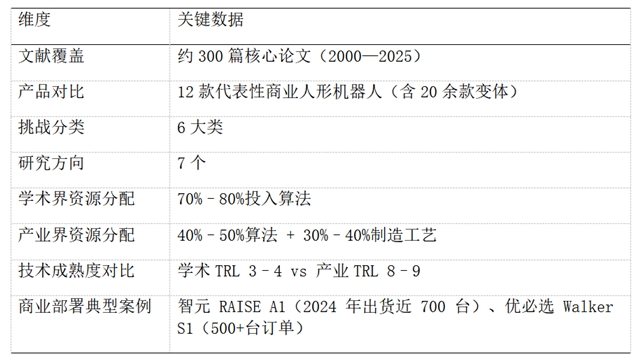
(2)数据亮点:覆盖约300篇核心文献、12款代表性商业产品、6大挑战、7大未来方向。
(3)时代意义:在全球人形机器人产业化加速、我国《人形机器人创新发展指导意见》出台的关键节点,提供权威系统的研究地图。
(4)读者价值:科研工作者可据此把握前沿方向,工程师可据此理解工程化痛点,政策制定者可据此判断产业格局,投资者可据此识别赛道机会。
未来展望关键数据
(来源:EngineeringJournals微信公众号)
相关论文信息:https://ieeexplore.ieee.org/document/11397510
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。