|
|
|
|
|
自主货车与机器人末端物流平台:参考架构与概念验证实现 | MDPI Logistics |
|
|
论文标题:Autonomous Van and Robot Last-Mile Logistics Platform: A Reference Architecture and Proof of Concept Implementation
论文链接:https://www.mdpi.com/2305-6290/9/1/10
期刊名:Logistics
期刊主页:https://www.mdpi.com/journal/logistics
1. 引言
• 背景与挑战:随着城市物流中最后一公里配送的货物量持续增加,客户需求日益多样化,加之司机短缺问题,城市物流面临重大挑战。这些挑战不仅影响配送效率和成本,还对城市公共空间和交通造成干扰。
• 自主驾驶的潜力:自主驾驶技术为解决这些问题提供了新途径,通过减少对人力的依赖,实现全天候低成本运营。BeIntelli研究项目通过两个用例,探索了自主配送车和人行道自主配送机器人(SADR)在最后一公里的应用。
2. 贡献与概述
• 研究目标:本文提出了一个针对城市环境中自主“货车与机器人”(VnR)最后一公里物流和枢纽到枢纽(H2H)物流的参考架构。该架构旨在通过集成自主车辆操作、数据处理和利益相关者协作,推动自主最后一公里配送解决方案的实施。
• 架构概述:基于蓝图架构,本文详细描述了现有解决方案、概念、趋势和技术要求,并将其映射到架构的各个组件中,包括硬件、中间件、自主驾驶系统(ADS)、平台和应用程序等层次。
3. 自主物流的应用领域
• 不同运输领域的应用:自主车辆在不同运输领域和行业中有广泛应用,从内部设施物流到公共道路混合交通货物运输。本文分类介绍了这些应用领域,并讨论了不同类型自主车辆(如自主卡车、配送车和机器人)的特点和适用场景。
• VnR方法:结合配送车和SADR的优势,VnR方法在最后一公里配送中展现出巨大潜力,通过利用配送车的批量运输能力和SADR的灵活性和低空间需求,提高配送效率。
4. 蓝图架构
• 架构基础:蓝图架构基于分布式人工智能(DAI)方法,通过车辆、边缘和云三层结构实现自主驾驶。该架构提供了一个模型,用于在平台经济中构建自主移动解决方案。
• 核心组件:架构包括硬件、中间件、ADS、平台和应用程序等核心组件,每个组件包含多个子组件,共同实现自主驾驶功能。
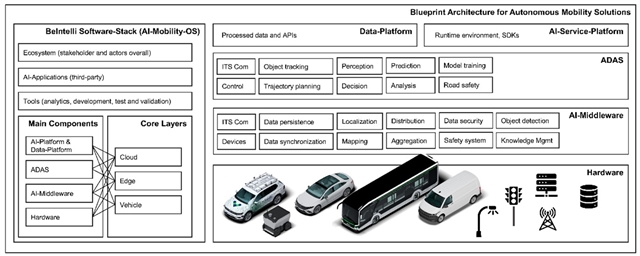
图1. 自主移动的蓝图架构[33]:描述了自主移动(AM)解决方案的主要组件和核心层次-该图还展示了各组件的通用元素
5. 最后一公里物流(LML)的转型
• LML的重要性:最后一公里物流在供应链管理中扮演关键角色,直接影响客户满意度和配送成本。随着物流设施的数字化和互联车辆的发展,LML正转变为一个由各种利益相关者和对象组成的互联生态系统。
• 技术进步的影响:物联网、云计算、数据分析和数字平台等技术进步正在推动LML的变革,实现智能路线规划、实时跟踪和预测分析等功能,提高效率和可靠性。
6. 迈向自主物流架构——BeIntelli案例
• 用例与需求:BeIntelli项目的核心用例基于VnR概念,通过自主配送车运输SADR及其货物,实现高效的最后一公里配送。本文详细描述了该用例的场景和要求,包括路线规划、货物分配和实时跟踪等。
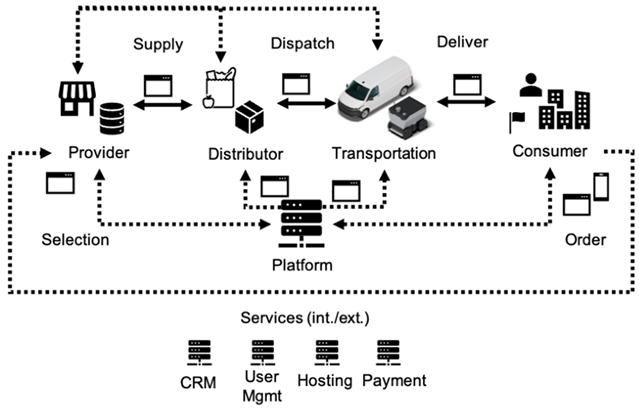
图2. “货车与机器人”概念的高级场景图
• 参考架构:基于蓝图架构和VnR概念的要求,本文提出了一个精细化的参考架构,包括供应商、消费者、操作和平台等核心元素,并详细描述了各组件的功能和交互方式。
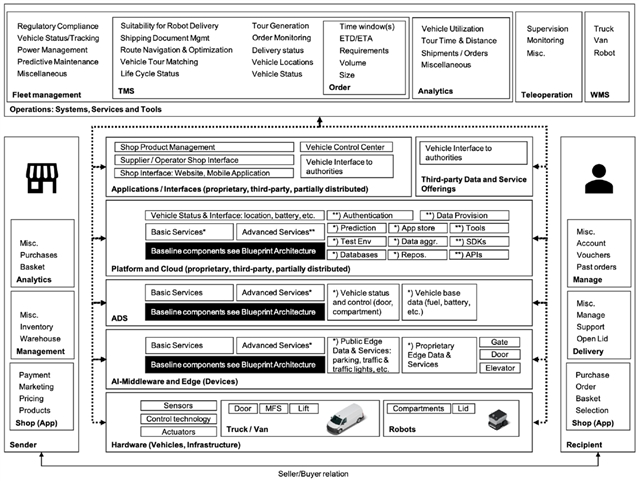
图3. 自主货车与机器人最后一公里物流的参考架构提案:该架构基于第5节介绍的蓝图架构,并对实现“货车与机器人”(VnR)用例所需的组件进行了深入分类
7. BeIntelli项目中的LML架构应用与测试
• 实际实验室角色:BeIntelli项目中的实际实验室环境为开发、测试和验证VnR场景提供了基础,包括数据采集、处理、存储和提供不同粒度的服务。
• 架构实现与评估:本文展示了参考架构在BeIntelli项目中的应用,并评估了其优势和局限性。通过实际测试,验证了架构的可行性和有效性,并提出了未来改进方向。
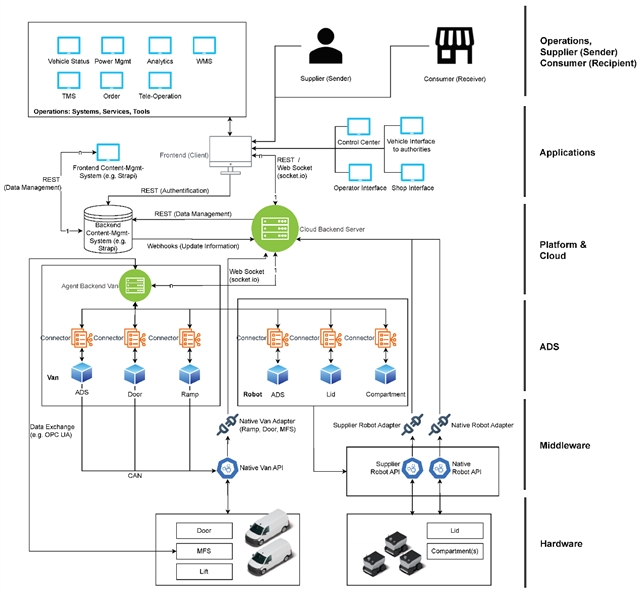
图4. 不断演进的BeIntelli最后一公里物流(LML)参考架构
Artificial Intelligence and Business Analytics Applications in Supply Chain Operations
投稿截止日期:2026 年 10 月 16 日
客座编辑:Prof. Dr. Hokey Min and Prof. Dr. Seong-Jong Joo
https://www.mdpi.com/journal/logistics/special_issues/HPDY8OP4H5
期刊介绍
主编:Prof. Dr. Robert Handfield
Logistics(ISSN 2305-6290)是一个为物流和供应链管理领域的研究人员及具有学术倾向的从业者设立的原创性期刊。期刊主要发表与物流和供应链相关的原创文章和高质量综述。主题涵盖领域包括但不限于:人工智能、物流分析和自动化;可持续发展与逆向物流;人道主义和医疗保健物流;最后一公里,电子商务与销售物流;海运物流;供应商,政府和采购物流等。
2024 Impact Factor:3.6
2024 CiteScore:8.0
Time to First Decision:19.6 Days
Acceptance to Publication:4.6 Days
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






