|
|
|
|
|
FASE 亮文解读丨用于番茄采摘机器人的刚柔耦合末端执行器的设计与性能评估 |
|
|
论文标题:Design and performance evaluation of a rigid-flexible coupling end-effector for tomato picking robots
期刊:Frontiers of Agricultural Science & Engineering
作者:Qizhi YANG, Guangyi QU, Xia ZHONG, Xinyu YANG, Lei LIU, Xu HU, Min M. Addy
发表时间:14 Jul 2025
DOI: 10.15302/J-FASE-2025643
微信链接:点击此处阅读微信文章
Apr 2026, Volume 13 Issue 2
· 第1篇 ·
▎论文ID
Design and performance evaluation of a rigid-flexible coupling end-effector for tomato picking robots
用于番茄采摘机器人的刚柔耦合末端执行器的设计与性能评估
文章类型:Research Article
发表年份:2025年
第一作者:杨启志,Min M. Addy
通讯作者:杨启志
Email: qzyrobot@126.com
作者单位:江苏大学农业工程学院
Cite this article :
Qizhi YANG, Guangyi QU, Xia ZHONG, Xinyu YANG, Lei LIU, Xu HU, Min M. Addy. Design and performance evaluation of a rigid-flexible coupling end-effector for tomato picking robots. Front. Agr. Sci. Eng., 2026, 13(2): 25643 DOI:10.15302/J-FASE-2025643
· Graphical abstract ·
· 主 要 内 容 ·
番茄是全球重要的蔬菜作物,但其采摘作业长期依赖人工,面临劳动强度大、成本高、果实易损伤等问题。设施番茄种植中,果实常成簇生长且枝叶密集,传统机械采摘设备易受环境干扰,导致采摘成功率低或损伤率高。如何在复杂种植环境中实现番茄的高效无损采摘呢?
江苏大学农业工程学院杨启志团队联合美国明尼苏达大学Min M. Addy博士等,研发出了一种集成伸缩吸盘与三指抓手的刚柔耦合末端执行器,为这一难题提供了创新解决方案。
本研究创新性地采用“吸附-夹持”协同作业模式。末端执行器先通过真空吸盘伸出并吸附目标番茄,将其从枝叶中拉出以避免干扰,再启动三指抓手完成夹持。这种分步操作流程解决了传统单一夹持或吸附方式的缺陷——前者易因力度不当损伤果实,后者则受表面曲率和湿度影响稳定性不足。
团队通过180组实验确定了最优作业参数:270度旋转角度配合8.36 N复合力。实验数据显示,该参数下采摘时间较传统机械减少了40%,单个果实采摘周期仅需5.4秒。通过建立吸附力 (3.58 N) 与夹持力 (5.94 N) 的复合分析框架,系统实现了88%的采摘成功率,果实损伤率控制在0.5%以下。在模拟温室环境 (22 ℃、60%湿度) 测试中,该设备作业效率比人工采摘高出55%,且可连续工作以降低劳动强度。
针对温室环境下的复杂光照条件,研究采用YOLOv5 + HSV混合识别模型,通过融合深度学习算法与颜色空间分析技术,提升了夜间采摘的识别精度与速度。性能对比显示,与纯吸附式 (成功率84%、损伤率1.4%) 和纯夹持式 (成功率81%、损伤率7.7%) 执行器相比,新系统在成功率、损伤率和作业速度上综合优势显著。
本研究为番茄采摘机器人提供了关键技术支撑,其刚柔耦合设计理念经实验验证,可有效满足设施番茄机械化采摘需求。随着农业劳动力短缺问题加剧,此类智能化装备的应用将有效降低生产成本,推动设施农业向高效、精准方向发展。
· 主 要 图 表 ·

图1 实验方案图。
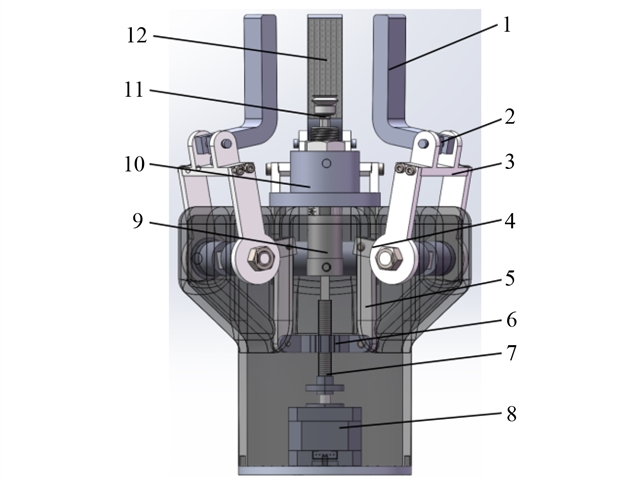
图2 末端执行器整体结构 (1. 夹爪;2. 扭簧;3. 四孔连接件;4. 连杆;5. 摇杆;6. 丝杠螺母;7. 滚珠丝杠;8. 电机;9. 气缸;10. 立柱固定件;11. 真空吸盘;12. 硅胶垫)。
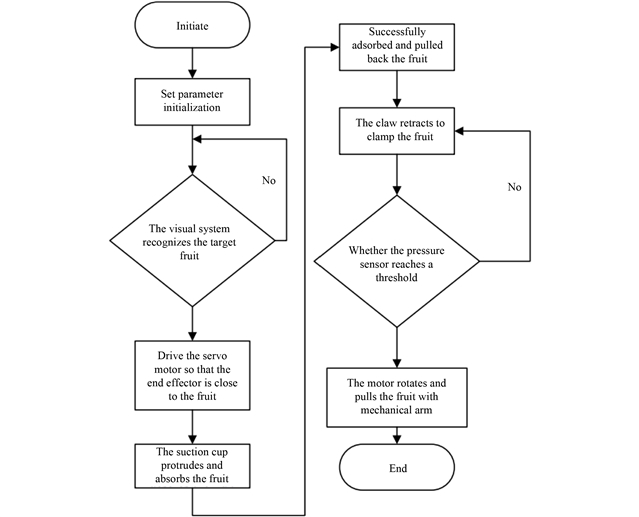
图3 工作流程图。
表1 不同末端执行器及人工采摘的性能对比

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






