|
|
|
|
|
FME文章速览 | 考虑运动不确定性的四轮移动机器人避障自适应控制 |
|
|
论文标题:Obstacle-circumventing adaptive control of a four-wheeled mobile robot subjected to motion uncertainties
期刊: Frontiers of Mechanical Engineering
作者:Yiming YAN, Shuting WANG, Yuanlong XIE, Hao WU, Shiqi ZHENG, Hu LI
发表时间: 15 Sept 2023
DOI:10.1007/s11465-023-0753-3
微信链接:点击此处阅读微信文章
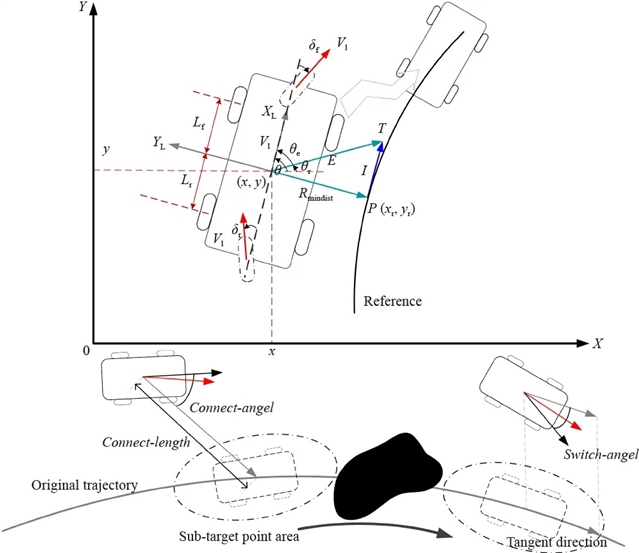
本篇研究论文发表于《Frontiers of Mechanical Engineering》2023年18卷第3期,题为“Obstacle-circumventing adaptive control of a four-wheeled mobile robot subjected to motion uncertainties”。文章聚焦于四轮移动机器人(FMR)在运动不确定性下的避障自适应控制(OCAC)问题,提出了一个新的框架,该框架整合了抗干扰终端滑模控制(ADTSMCAG)和子目标动态跟踪回归避障(SDTROA)策略。ADTSMCAG通过设计改进的比例积分滑模面与分段自适应增益控制律,实现系统快速收敛并消除抖振。SDTROA策略引入子目标点,将传统的避障问题转化为子目标点动态跟踪问题,结合改进的矢量场直方图(VFH+)局部规划算法,减少局部路径搜索负担,确保避障时的系统稳定性。实验在无扰动、受扰环境下验证了ADTSMCAG相较于比例-积分-求导(PID)和常规滑模控制在轨迹跟踪上的快速性与鲁棒性,在动态障碍物场景中,SDTROA策略较传统人工势场法展现出更高的轨迹重合度和规划效率。该研究为FMR在复杂动态环境中的高效避障与精准跟踪提供了有效解决方案。
关键词
四轮移动机器人;避障自适应控制;自适应抗干扰终端滑模控制;子目标动态跟踪回归避障
引用
Yiming YAN(严一鸣), Shuting WANG(王书亭), Yuanlong XIE(谢远龙), Hao WU(吴昊), Shiqi ZHENG(郑世祺), Hu LI(李虎). Obstacle-circumventing adaptive control of a four-wheeled mobile robot subjected to motion uncertainties. Front. Mech. Eng., 2023, 18(3): 37
https://doi.org/10.1007/s11465-023-0753-3

扫描二维码阅读原文
精彩推荐
1.FME文章速览 | 通过新型自适应关节和协同策略增强多移动机器人协同搬运系统的地形适应性
2.FME文章速览 | 用于具有可编程磁排列柔性致动器的多材料磁场辅助增材制造系统
3.FME文章速览 | 高速行星探测车的设计方法、综合与控制策略
4.FME文章速览 | 基于接触面积响应一致性的气囊抛光仿真模型优化
5.FME文章速览 | 可悬停微型扑翼飞行器升力系统优化
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。