|
|
|
|
|
FME文章荐读|考虑全状态约束与扰动的气动肌肉系统自适应模糊动态表面控制 |
|
|
论文标题:Adaptive fuzzy dynamic surface control for pneumatic muscle systems with full-state constraints and disturbances
期刊: Frontiers of Mechanical Engineering
作者:Yan SHI, Jie ZHENG, Yixuan WANG, Shaofeng XU, Zhibo SUN, Changhui WANG
发表时间:15 Apr 2025
DOI:10.1007/s11465-025-0831-9
微信链接:点击此处阅读微信文章
在智能革命时代,气动人工肌肉(PAM)执行器在机器人技术中具有重要意义,尤其在要求高安全性和灵活性的任务中。尽管PAM具有固有的灵活性,但其复杂的材料特性(包括滞后、非线性和低响应频率)给精确建模和运动控制带来挑战,限制了其广泛应用。
《Frontiers of Mechanical Engineering》2025年第20卷第2期的一篇题为“Adaptive fuzzy dynamic surface control for pneumatic muscle systems with full-state constraints and disturbances”的研究论文,提出了一种针对具有全状态约束和干扰的气动肌肉系统的自适应模糊动态表面控制方法,通过结合动态表面控制、模糊逻辑系统和障碍李雅普诺夫函数,有效解决了系统的非线性、滞后和状态约束等问题,实验验证了该方法在提高控制精度和响应速度方面的有效性。
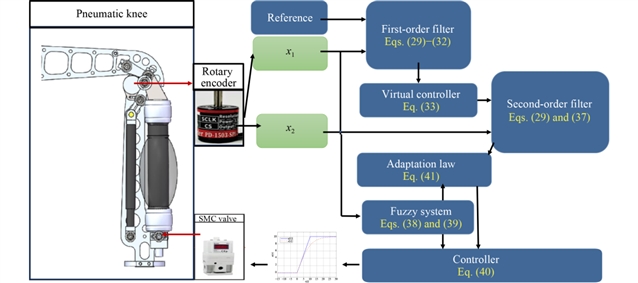
文章阐述了PAM系统的原理图配置,详细说明了其动态模型,并阐述了PAM系统跟踪挑战的数学框架。在气动膝关节设计中,采用四杆联动机构,依据中国成人标准确定腿部尺寸参数,通过几何配置推导相关方程,建立膝关节角度与PAM之间的关系。PAM参考模型通常由弹簧、阻尼和收缩元件组成,简化模型时省略高阶项引入不确定性,采用线性化三元件模型。在问题预备部分,定义系统饱和输入,通过定义状态变量将系统表示为特定形式,为处理输入饱和,将控制输入表示为平滑饱和近似和有界误差项的复合函数,重新编写系统方程。同时,详细介绍了FLS自适应控制器的设计过程,为控制专家提供了有价值的见解。
研究展示了所提出的基于DSC的自适应控制器可实现膝关节角度轨迹跟踪的控制目标。首先给出定理,在给定PAM系统、控制设计参数满足一定不等式的情况下,确保闭环系统所有信号一致最终有界,系统输出能有效跟踪期望信号且避免全状态约束违反。然后通过构建李雅普诺夫函数,对其求导并进行一系列推导,得到关于李雅普诺夫函数导数的不等式,进一步求解不等式,证明当时间趋于无穷时,李雅普诺夫函数趋于某一值,从而得出系统状态有界,验证了系统的稳定性和控制策略的有效性。
为验证提出的算法,在自主研发的气动膝关节上进行实验,使用高速旋转编码器检测膝关节旋转,采用特定型号的气动肌肉,通过比例阀控制其充放气,使用国家仪器(NI PXIE)机箱作为控制平台。实验中系统采用恒定阶跃信号和正弦信号作为参考轨迹,对状态变量施加严格约束。结果表明,所提出的控制方法在阶跃信号和正弦信号跟踪中均表现出优异的跟踪精度,跟踪误差小,响应速度快,控制输入受限且稳定,补偿变量调整有效,与其他控制算法相比,在综合性能指标上具有明显优势,验证了算法在处理系统振荡和维持操作约束方面的鲁棒性。
关键词
自适应模糊控制;跟踪控制;PAM系统;状态约束;输入饱和
引用
Yan SHI(石岩), Jie ZHENG(郑婕), Yixuan WANG(王一轩), Shaofeng XU(许少峰), Zhibo SUN(孙治博), Changhui WANG(王昌辉). Adaptive fuzzy dynamic surface control for pneumatic muscle systems with full-state constraints and disturbances. Front. Mech. Eng., 2025, 20(2): 14
https://doi.org/10.1007/s11465-025-0831-9
扫描二维码阅读原文
精彩推荐
1.FME文章荐读|基于机器学习的机构运动学分析与综合方法综述
2.FME文章荐读 | 变工况下轴承故障诊断的基于加权DJP-MMD的深度迁移度量学习方法
3.FME文章速览 | 通过新型自适应关节和协同策略增强多移动机器人协同搬运系统的地形适应性
4.FME文章速览 | 用于具有可编程磁排列柔性致动器的多材料磁场辅助增材制造系统
5.FME文章速览 | 高速行星探测车的设计方法、综合与控制策略
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






