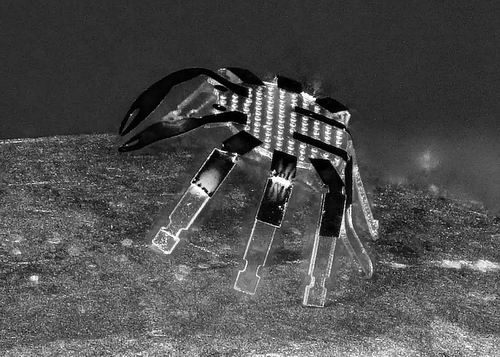
外形像螃蟹的微型机器人 受访者供图
■本报记者 张晴丹
史上最小的遥控步行机器人来了!它们只有半毫米宽,体积还不及一只跳蚤大,可以行走、弯曲、扭曲、拐弯和跳跃。
这些“小可爱”们能在狭窄空间内执行重要任务。由于体形非常小,它们可以轻而易举地进入人体开展工作——清除阻塞的动脉、止血或消除恶性肿瘤。
这种微型机器人的研制者是美国西北大学冠名讲席教授黄永刚、John A. Rogers及清华大学航天航空学院教授张一慧及其带领的国际合作团队。相关研究近日发表于《科学—机器人》。
运动多样,动作敏捷
这项研究的灵感来源于小动物或昆虫,如螃蟹、蜘蛛、尺蠖、蟋蟀和甲虫。
“我们做了很多种不同形态的微型机器人,大家印象最深的是长得像螃蟹一样的机器人,它们爬起来的确很有趣。”论文通讯作者张一慧在接受《中国科学报》采访时介绍。
最令人惊讶的是,这些微型机器人动作十分敏捷,快速变形可达每秒10次,平均每秒可行走身体长度的一半。
研究团队使用了一种形状记忆合金材料。让它与二氧化硅和一款骨架材料共同作用,把形状“记忆”下来,帮助达到塑形的目的。
和常规机器人不同,这款微型机器人并非由复杂的硬件、液压或电力驱动。它的能量来源于身体的弹性,靠的是热驱动。张一慧介绍,用激光扫描机器人,因为其组装材料热膨胀系数各不相同,加热后材料间的热学失配可以驱动小机器人不断变换形态,从而产生运动。
激光不仅能远程控制机器人动起来,激光扫描的方向还决定了机器人行走的方向。例如,若从左往右扫描,机器人就会从右向左行走。
而且,每款形态的机器人做出的动作也千差万别。“通过不同的形态设计,依赖腿的协调和对变形的控制,机器人可拥有不同的运动模式,比如爬行、跳跃、拐弯、走路等。”张一慧说。
基于一套方法的N次创新
让有腿的机器人跳跃和爬行已不是什么难事,但之前在如此小的尺度上是根本做不到的。该团队之所以能够实现,是基于一种微尺度三维结构组装方法。这种方法最早在2015年以封面论文的形式发表于《科学》,黄永刚、A. Rogers和张一慧是论文通讯作者。
论文一经发表便引起了学术界的广泛关注,成果很快被《自然》等期刊在专栏中报道。这也是国际上首次将可控力学屈曲引入至微尺度的复杂三维结构组装,实现了从二维微纳米薄膜到三维细微观结构的高精度组装。
其原理似乎并不复杂。张一慧介绍,就像折叠立体圣诞卡,打开之后三维结构会弹起来。
在这个过程中,还有一个重要角色,即一个由非常柔软的弹性聚合物(比如硅胶、橡胶等)做的组装平台。这种材质拉伸性很强,可以拉到很大,便于将平面薄膜图案在上面进行压缩。
张一慧说,之前提到的制作微型机器人的3种材料就是基于这样的组装平台通过压缩力的作用,从二维结构变成三维结构,并在材料特殊“记忆”能力的加持下成功固形。
该方法适用的材料范围非常广,如半导体硅、金属、陶瓷、聚合物、塑料等各种材料类型。而且适用于各个特征尺度下的材料组装,从纳米到分米从而轻松打造微小结构造型。
目前,这项微型机器人研究处于探索阶段。下一步研究团队还会做些工作让它们能与人更好地交互,融入智能化,展现更多的智慧。
相关论文信息:
https://doi.org/10.1126/scirobotics.abn0602
https://doi.org/10.1038/s41586-021-03847-y
《中国科学报》 (2022-06-02 第2版 国际)






