|
|
|
|
|
中山大学空天智能无人系统课题组——面向无人机集群韧性任务分配的双层 PSO-ILP 优化方法 | MDPI Drones |
|
|
论文标题:Resilient Task Allocation for UAV Swarms: A Bilevel PSO-ILP Optimization Approach
论文链接:https://www.mdpi.com/2504-446X/9/9/623
期刊名:Drones
期刊主页:https://www.mdpi.com/journal/drones
无人机集群已被广泛应用于各类复杂任务场景,然而在不确定动态环境下,如何统一量化异构资源、保障任务高效执行并维持系统操作韧性,成为无人机集群任务分配亟待解决的关键问题。中山大学空天智能无人系统课题组在 Drones 期刊发表题为 “Resilient Task Allocation for UAV Swarms: A Bilevel PSO-ILP Optimization Approach” 的研究论文,提出了一种面向无人机集群的韧性任务分配优化方法。该方法旨在实现严格资源约束下的任务性能优化,同时确保系统在遭受外部干扰时仍能保持较高韧性。此项研究为异构无人机集群任务能力与多维任务需求的深度融合提供了可行方案,对提升集群应对突发中断、维持持续任务执行性能的能力具有重要理论与工程意义。
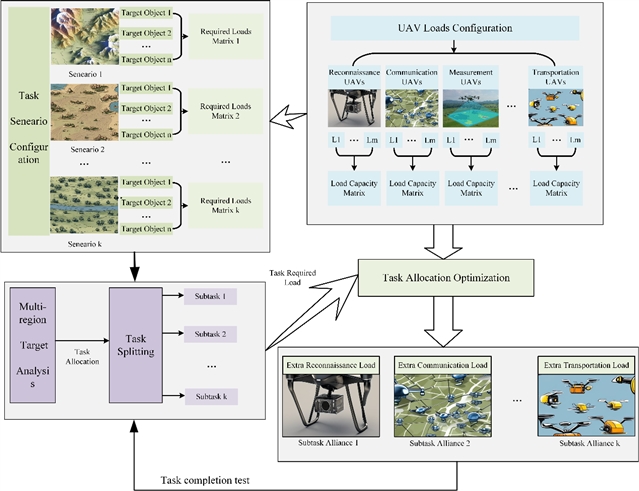
图1 无人机集群任务分配框架
研究过程与结果
在本文中,针对无人机集群在复杂动态环境下任务分配面临的核心挑战,作者提出了一种基于任务韧性的优化框架。为实现异构资源与任务需求的精准匹配,研究引入等效载荷概念,结合无人机自身任务能力与任务区域的多维需求,构建了一套多维度量化评估体系;在此基础上,进一步设计了可量化的任务韧性评估模型,有效解决了现有研究方法中对任务韧性关注不足、缺乏系统量化手段的问题。针对该问题所涉及的多目标优化难题,本文创新性地提出“问题可分解性定理”,并基于该定理设计了双层粒子群优化—整数线性规划(PSO-ILP)混合优化算法,实现了无人机集群负载成本与任务韧性的协同联合优化。为验证所提方法的有效性,研究设计了涵盖多任务区域、多种载荷类型及多种无人机类型的仿真实验,实验结果表明,该方法在算法收敛性、负载成本与任务韧性的综合优化效率方面均表现出显著优势。尤为值得关注的是,当中断概率处于0.2~0.6区间时,该方法能够在实现负载成本最小化的同时,维持系统较高的任务韧性,显著提升了无人机集群应对突发中断的能力与系统整体韧性表现。综上,本文所取得的研究成果,不仅丰富和完善了无人机集群韧性优化领域的理论基础,更为各类复杂场景下无人机集群任务分配的工程优化提供了普适性强、可操作性高的解决方案。
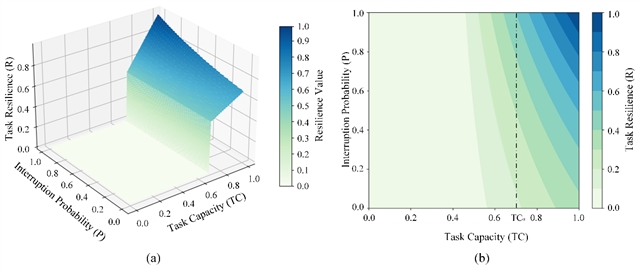
图2 任务韧性(R)模型的可视化。(a)显示任务能力(TC)和中断概率(P)函数关系的 3D 曲面图。(b)对应的 2D 等高线图。
研究总结
本文提出的PSO-ILP双层优化框架,为干扰环境下无人机集群的任务分配提供了创新性解决方案。与传统被动恢复策略相比,该框架通过功能分层设计,将任务韧性主动嵌入任务分配全过程,有效实现了集群负载成本与任务韧性的协同优化。仿真实验结果表明,所提框架在算法收敛性、任务完成所需无人机数量及总负载成本等关键指标上,均优于现有其他对比算法;尤其当中断概率处于0.2~0.6的场景下,该框架展现出更为显著的任务韧性优势。该研究为复杂干扰环境下无人机集群任务分配问题,提供了一条兼顾系统鲁棒性与经济性的技术路径。未来研究将进一步推动该框架在大规模任务处理及动态复杂场景中的工程化应用,进而提升无人机集群的复杂环境适应性与任务执行可靠性。
引用格式:
Zeng, Y.; Wu, L.; Li, J.; Zhuang, X.; Wu, C. Resilient Task Allocation for UAV Swarms: A Bilevel PSO-ILP Optimization Approach. Drones 2025, 9, 623.
期刊介绍
Drones 是一个国际性的、同行评审的、开放获取的期刊,专注于无人机(包括无人驾驶飞行器 (UAV)、无人飞行器系统 (UAS)、遥控驾驶飞行器系统 (RPAS) 等)的设计和应用,以及无人海洋/水上/水下无人机、无人地面车辆、全自主驾驶和太空无人机的设计和应用。
2024 Impact Factor:4.8
2024 CiteScore:7.4
Time to First Decision:20.8 Days
Acceptance to Publication:2.7 Days
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。