|
|
|
|
|
康复外骨骼机器人控制技术进展:系统综述 | MDPI Actuators |
|
|
论文标题:Advances in Control Techniques for Rehabilitation Exoskeleton Robots: A Systematic Review
论文链接:https://doi.org/10.3390/act14030108
期刊名: Actuators
期刊主页:https://www.mdpi.com/journal/actuators
一、引言
外骨骼机器人正成为辅助运动障碍患者的重要工具,能够在物理康复的各阶段提供支持与引导。随着控制技术的快速发展,外骨骼机器人现已配备精密的控制系统,在安全性、灵活性和适应性方面显著提升,以满足患者的个性化需求。有效的控制系统对于实现精确的运动轨迹跟踪、适应人机交互的动态特性以及保障用户舒适与安全至关重要。本文系统综述了康复外骨骼控制技术的最新进展,重点分析各类控制方法在提升康复效果方面的作用。
二、当前综述
现有综述文章大多侧重于研究人机接口而非康复外骨骼所采用的控制技术,常聚焦于生理信号(如肌电、脑电、心电)的交互机制。部分综述探讨智能控制系统,另一些关注康复应用,但鲜有将传统基于模型的控制方法与智能控制系统并行分析的研究。本文旨在填补这一空白,对康复外骨骼机器人控制的传统控制技术和智能控制系统进行系统梳理。
三、方法
本系统综述遵循结构化流程,分为五个阶段:明确研究问题、识别相关研究、依据纳入排除标准筛选文献、提取数据、分析结果。检索数据库包括PubMed、IEEE Xplore、Scopus和Web of Science,关键词涉及“计算转矩控制”、“自适应控制”、“滑模控制”等,限定2014至2024年发表的同行评议期刊与会议论文。纳入标准为:康复外骨骼机器人、提出新型控制系统、进行动力学仿真或人体被试实验。排除软体机器人、未应用新型控制系统的论文及综述类文献。图1展示了从数据库检索到最终纳入研究的完整筛选流程,包括各阶段文献数量变化。
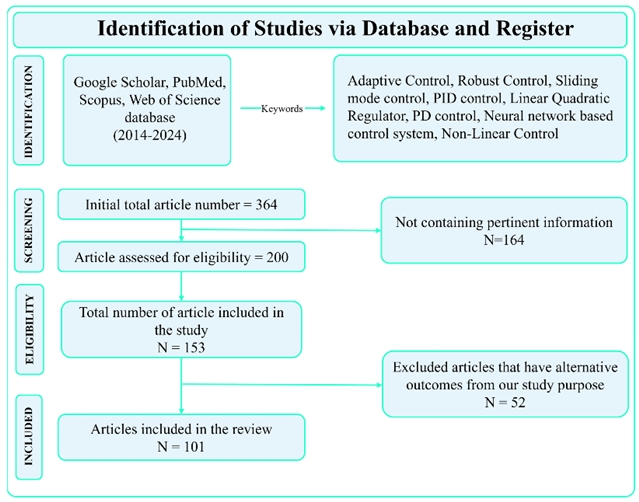
图1. 检索与纳入流程图。
四、机器人动力学建模
机器人动力学具有非线性特征,需采用非线性控制系统。常用建模方法有牛顿-欧拉法和拉格朗日法。机器人动力学包含质量矩阵、重力项、科里奥利力和离心力以及关节摩擦。精确的动力学模型对基于模型的控制系统至关重要,模型不准确会导致控制精度和可靠性下降。图2显示了机器人关节驱动力矩的分配,包括惯性力、科里奥利力、离心力、重力及摩擦力等分量。
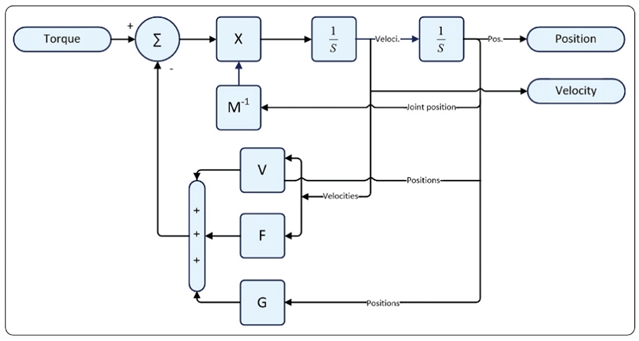
图2. 包含摩擦模型的机器人动力学
五、机器人控制系统概述
机器人控制系统负责调节机器人动作及其与环境交互,在康复机器人中尤为重要。控制系统依赖反馈回路,通过传感器实时监测位置、力和环境变化,实现连续调整。现代控制系统融合自适应、鲁棒和智能控制,以应对人机交互的复杂需求。
5.1 非线性控制系统
非线性控制系统能够处理人机交互中动态多变的力,使外骨骼更自然有效地响应用户动作。
5.1.1 计算转矩控制
计算转矩控制是一种基于模型的控制方法,利用机器人动力学模型精确计算各关节所需转矩,实现精确轨迹跟踪。该方法由线性化回路和控制回路组成,将非线性系统线性化,简化控制设计。计算转矩控制高度依赖模型精度,常与自适应或鲁棒控制结合以补偿建模误差。
5.1.2 自适应控制
自适应控制能够实时调整参数,适应患者运动能力、肌力或疲劳程度的变化,是提供个性化康复支持的关键。该类控制器通过传感器持续监测用户动作,动态调整输出,确保稳定性和舒适性。自适应控制常与机器学习结合,使外骨骼在多轮训练中不断优化响应。
5.1.3 鲁棒控制
鲁棒控制旨在系统存在不确定性和外部扰动时维持稳定性,配置后可处理预设范围内的变化。该方法对于康复场景中用户运动多变、外力不可预测的情况尤为重要。常见方法包括H无穷控制和滑模控制。
5.1.4 滑模控制
滑模控制通过将系统状态强制约束在预设滑模面上运动,对建模误差和扰动具有良好抑制能力。其核心是高频切换控制信号,但易产生抖振现象。为减轻抖振,发展了边界层法、高阶滑模等改进技术。
六. 讨论
本文系统梳理了康复外骨骼机器人控制技术的研究现状。计算转矩控制精度高但依赖模型准确性,需结合神经网络或自适应技术补偿不确定性。自适应控制擅长处理患者个体差异,但参数收敛性仍需验证。滑模控制鲁棒性强但存在抖振问题,高阶算法可缓解但增加复杂度。鲁棒控制提供稳定保障,但对不确定性范围有一定预设要求。当前研究的主要不足包括:临床患者验证不足、评价指标不统一、对患者舒适度关注有限、传统控制与智能控制融合不充分。
引用格式:
Mashud, G.; Hasan, S.; Alam, N. Advances in Control Techniques for Rehabilitation Exoskeleton Robots: A Systematic Review. Actuators 2025, 14, 108.
Actuators期刊介绍
主编:Kenji Uchino, The Pennsylvania State University, USA
Norman M. Wereley, University of Maryland, USA
Actuators期刊涵盖与执行器和控制系统相关的科学与技术,期刊下设包括执行器材料、航空执行器、机器人执行器、控制系统等10个专题,为执行器和控制系统的科学和技术提供了一个先进的论坛。期刊已被Scopus、SCIE (Web of Science) 等数据库收录。
2024 Impact Factor:2.3
2024 CiteScore:4.3
Time to First Decison:20.9 Days
Acceptance to Publication:2.7 Days
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。