论文标题:Small tracking error correction for moving targets of intelligent electro-optical detection systems
期刊: Frontiers of Mechanical Engineering
作者:Cheng SHEN, Zhijie WEN, Wenliang ZHU, Dapeng FAN, Mingyuan LING
发表时间:15 Apr 2024
DOI: 10.1007/s11465-024-0782-6
微信链接:点击此处阅读微信文章

国防科技大学范大鹏、温志杰、申程研究团队在《Frontiers of Mechanical Engineering》2024年19卷第2期发表了题为“Small tracking error correction for moving targets of intelligent electro-optical detection systems”的研究论文。文章提出一种智能光电探测系统运动目标的小跟踪误差校准新方法,经仿真和实验验证,该方法能有效提高系统跟踪精度和射击精度。
目的:光电探测系统,是一种融合机电伺服和光测成像技术对目标实施跟踪瞄准的精密智能设备,广泛应用在舰船舰艇、车载机载、近地面观测等稳定平台,是高科技装备向无人化趋势发展的核心组件。但是图像跟踪器受到帧频、镜头分辨率和机芯硬件算力的影响,跟踪器从敏感外界目标到转换成脱靶量信号之间存在一小偏差时滞,进而引起光电探测系统跟踪瞄准时的超调和振荡,甚至导致无人化射击过程中跟踪精度降低和目标捕捉的失败。
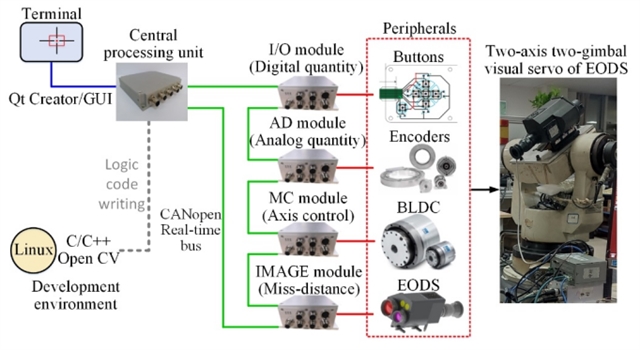
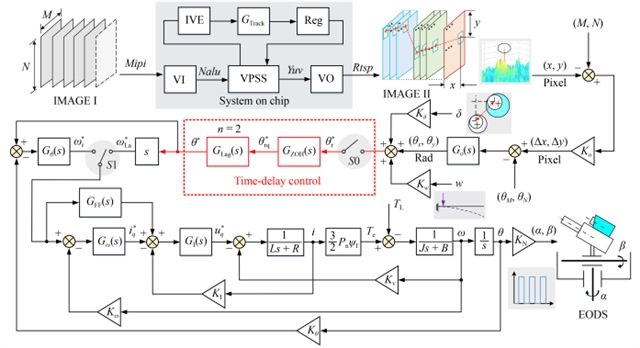
方法:为了补偿光电探测系统的跟踪器时滞,提高系统的跟踪精度和快速响应能力,提出了一种视觉伺服模型和图像跟踪器小偏差时滞预测方法。通过建立火力线-瞄准线共轴布局的视觉-伺服Euler坐标系转换模型,详细分析稳速控制回路和稳像跟踪回路的宏微复合控制机理,揭示了光电探测系统跟踪器时滞误差和瞄准线修正的定量关系。以传统驱动传动为依托,融合国产化Soc硬件光测成像编码推流的关键技术,给出了直流伺服电机、图像跟踪器、增量/绝对式编码器、陀螺仪、加速度计、磁力计组合的多采样率机电测控方法,提出了分段拉格朗日插值和零阶保持器双线性差分变换的视觉伺服预测模型,对图像跟踪器的小偏差时滞进行补偿,同时对视觉伺服跟踪时的多变量典型跟踪故障诊断模型及其不受控飞转抑制方法进行了讨论。
结果:为了验证提出方法的有效性,最后搭建了2自由度分布式实时以太网架构的精密视觉伺服平台对光电探测系统进行实验测试,同时搭建了步进电机-减速器-旋转连杆-特征靶标组合的动目标测试支架平台,能够提供-30°/s~30°/s角速度转动的模拟正弦运动目标。实验结果表明,在圆半径张角为1mrad区域内瞄准线位置误差的分布概率为66.7%,相比于传统控制方法,优化方法的射击精度提高了37.6%。
结论:所提方法不仅提高了光电探测系统的跟踪精度,并且讨论了火力线-瞄准线共轴布局下的飞转抑制方法,整体国产化PLC操作架构便于技术人员快速开发与模块化拓展使用,在低空反无人机等场景上具备广阔的发展前景。
关键词
光电探测系统;小跟踪误差;运动目标;视觉伺服;瞄准控制
引用
Cheng SHEN(申程), Zhijie WEN(温志杰), Wenliang ZHU(朱文亮), Dapeng FAN(范大鹏), Mingyuan LING(凌明远). Small tracking error correction for moving targets of intelligent electro-optical detection systems. Front. Mech. Eng., 2024, 19(2): 11
https://doi.org/10.1007/s11465-024-0782-6

扫描二维码阅读原文
精彩推荐
1. FME文章荐读 | 基于堆叠模型的机器学习实现大尺寸激光粉末床熔融成形Ti6Al4V合金机械性能预测
2. FME文章荐读 | 基于参数化水平集方法的曲线纤维增强复合材料结构屈曲优化
3. FME文章速览 | 四足机器人在复杂地形上的动态运动:一种运动-动力学优化方法
4. 综述文章 | 基于生物润滑剂的航空航天合金可持续磨削中磨削力、温度及砂轮磨损的对比评估
5. 综述文章 | 超精密加工与3D打印:现状、机遇和未来展望

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






