|
|
|
|
|
一种改进的海洋捕食者算法—基于分数阶PID控制器自动电压调节系统 | MDPI Fractal and Fractional |
|
|
论文标题:An Improved Marine Predators Algorithm-Tuned Fractional-Order PID Controller for Automatic Voltage Regulator System
论文链接:https://doi.org/10.3390/fractalfract7070561
期刊名:Fractal and Fractional
期刊主页:https://www.mdpi.com/journal/fractalfract
研究背景与创新点
在电力系统运行中,维持同步发电机的额定电压水平至关重要,自动电压调节器(AVR)是实现这一目标的关键设备,而分数阶(FOPID)PID控制器则是 AVR 系统中常用的控制器之一。不过,FOPID 控制器存在 5 个增益参数,相比传统 PID 控制器的 3 个增益参数,其整定难度更大。
为解决这一问题,来自马来西亚多所高校的研究团队提出了一种改进的海洋捕食者算法(MPA),用于AVR 系统 FOPID 控制器的参数整定。该改进主要体现在两方面:一是将 MPA 与安全实验动态算法(SEDA)相结合,以解决局部最优问题;二是引入可调节步长自适应系数(CF),提升算法的搜索能力。该研究改善了AVR系统的瞬态响应,并且在目标函数方面相比其他通过元启发式算法优化的FOPID控制器,性能提升约两倍。
研究过程与实验结果
1.改进海洋捕食者算法的设计
研究首先针对原有 MPA 存在的不足进行改进。在原有 MPA 的第 2 阶段,猎物位置更新仅依赖自身先前位置或当前最优捕食者位置,易陷入局部最优区域,因此融入 SEDA 的安全更新机制,根据预设概率随机将猎物更新位置向量的部分元素替换为最优捕食者位置向量的元素,帮助陷入局部最优的个体跳出并继续进行有效搜索。
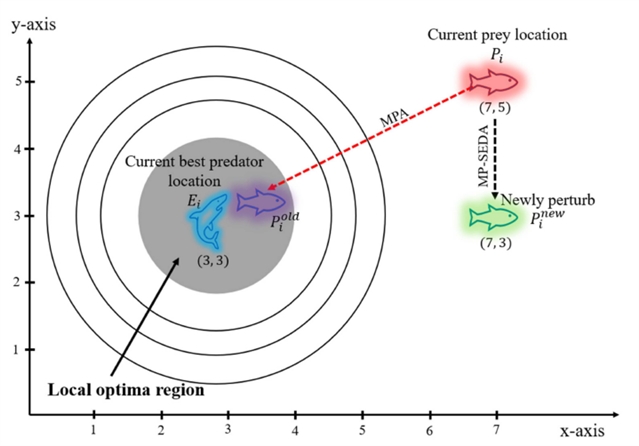
安全实验动态算法(SEDA)中安全更新机制的图形表示
同时,原有 MPA 的步长控制自适应系数(CF)限制较多,研究将其改进为可调节CF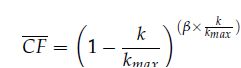 , 其中 β为可调节系数,当 β大于 2 时算法具有更强的开发能力, β 小于 2 时则有更强的探索能力,以此提升算法搜索性能。
, 其中 β为可调节系数,当 β大于 2 时算法具有更强的开发能力, β 小于 2 时则有更强的探索能力,以此提升算法搜索性能。
2. AVR 系统 FOPID 控制器的参数设定与性能验证
研究将 MP-SEDA 算法用于 AVR 系统 FOPID 控制器的参数整定,把算法中的智能体位置向量映射为 FOPID 控制器的 5 个参数 (Kp, Ki, Kd, λ,μ), 以改进的目标函数

其中ω为可调节权重系数,最小化为优化目标。
在阶跃响应分析中,MP-SEDA 设定的 FOPID 控制器(MP-SEDA-FOPID)目标函数均值为 0.01269131,最优值为 0.01107177,且收敛速度更快;其阶跃响应超调量Mp为 0.56%、上升时间为 0.083s、调节时间为 0.1103s、稳态误差为 1.24×10-7,相比于其他传统算法设定的 FOPID 控制器对应指标,可直观对比出 MP-SEDA-FOPID 控制器的性能优势。
3. 稳定性与鲁棒性分析
稳定性分析方面,MP-SEDA-FOPID 控制器的相位裕度为 168.8267,延迟裕度为 0.9986s、峰值增益为 0.0645dB、带宽频率为 26.9955Hz,虽相位裕度和延迟裕度不及 CAS (混沌蚁群优化)和 SA(模拟退火)算法,但拥有最高的带宽频率,能减少系统输出响应失真,保证 AVR 系统稳定运行。
在鲁棒性分析中,在轨迹跟踪(含测量噪声)、干扰抑制以及参数不确定性场景下,MP-SEDA-FOPID 控制器表现优异。例如,存在测量噪声时,其 IAE(积分绝对误差)、ISE(积分平方误差)、ITAE(积分时间绝对误差)、ITSE(积分时间平方误差)指标均为最低;在发电机增益时变不确定性下,各性能指标(IAE、ISE、ITAE、ITSE)与跟踪的性能指标偏差百分比,分别为 1.68%、3.08%、0.66%、1.43%,展现出强鲁棒性。
研究展望
本研究提出了基于带可调节 CF 的 MP-SEDA 算法的 AVR 系统 FOPID 控制器优化方法。总体而言,该方法具有良好的可行性与适用性,有望应用于多种控制领域。不过,目前该方法仅适用于单适应度函数的优化问题,对于多适应度函数优化可能无法给出理想结果,且改进的 MP-SEDA 算法需通过初步研究确定更多预设系数。未来可进一步开发多目标 MP-SEDA 算法,以提升系统性能精度,还可将该算法应用于其他非线性 PID 控制器,解决多输入多输出(MIMO)门式起重机控制系统、感应电机驱动电动汽车、MIMO双旋翼系统机动控制等实际应用问题。
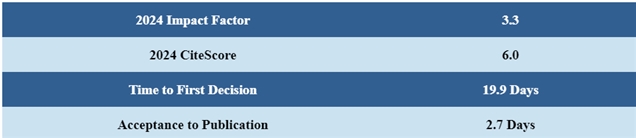
Fractal and Fractional 期刊介绍
主编:Carlo Cattani, University of Tuscia, Italy
期刊主题涵盖包括分形和分数阶微积分基础研究及其在不同科学和工程领域中的应用研究。现已被 SCIE (Web of Science)、Scopus 等重要数据库收录,JCR category rank: 22/136 (Q1),中国科学院2区。
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。