生命科学
|
医学科学
|
化学科学
|
工程材料
|
信息科学
|
地球科学
|
数理科学
|
管理综合
站内规定
|
手机版
首页
|
新闻
|
博客
|
院士
|
人才
|
会议
|
基金·项目
|
论文
|
绘图
|
视频·直播
|
小柯机器人
|
医学科普
头 条
更多>>
资深学者:错误数据被117篇论文以讹传讹
人畜共患病研究者帕帕斯追查医学文献后发现,一个错误数据已出现在117篇相关论文中。随着科学家越来越多地使用AI辅助写作,这个没有可靠出处的数字,可能正在被继续复制和放大。
正在直播|2026年中国科学院大学毕业典礼
6月21日8点,典礼仪式亮点纷呈。院士天团列队亮相,被学子称作“行走的参考文献”;党委书记、校长周琪院士以及优秀导师代表优秀毕业生代表进行精彩发言。
要 闻
更多>>
·
学术期刊“提质”,这项提升必选!
·
2025年度江苏省科学技术奖提名工作启动
·
这只不起眼的书包,陪伴何泽慧十几年
·
计算流体力学与分子动力学自动智能模拟计算平台发...
·
中科大团队在J/ψ光生过程中发现自旋干涉实验证据
·
科学家在高透明聚酰胺弹性体研究方面取得新进展
·
轻夸克希格斯相互作用研究取得新进展
·
华南农业大学教授毕英佐再次捐资支持学院发展
·
我国自主知识产权低碳修复技术获国际发明展金奖
轻夸克希格斯相互作用研究取得新进展
新闻图集
我国攻克硅基量子芯片关键材料
《自然》(20260611出版)一周论文导读
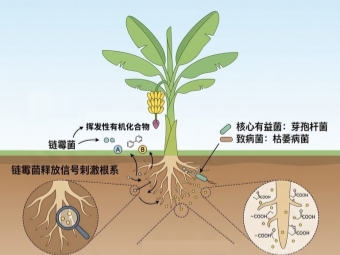
研究揭示链霉菌调控香蕉抗枯萎病分子机制
科报深度
更多>>
·
全球万名开发者聚首东莞松山湖,共赴“鸿蒙之约...
·
电动飞机要起飞,先得算清这笔“能量账”
·
绕过比对迷宫:拨开多倍体作物“遗传迷雾”
·
雌性昆虫为何“丢掉”翅膀?科学家破解百年演化...
·
人类5亿年前祖先的大脑可能长啥样
·
曾与诺奖“擦肩而过”?他深刻反省:需要死磕“...
国 际
更多>>
·
《自然》(20260618出版)一周论文导读
·
新方法预测晶体管缩小的物理极限值
·
线粒体铺设“专线”为细胞核供能
·
贝加尔湖周边发现约5500年前最古老鼠疫爆发证据
·
能够管理患者的医疗AI系统来了
·
mRNA流感疫苗可提供对多种病毒株的免疫保护
高 校
更多>>
·
中科大团队在J/ψ光生过程中发现自旋干涉实验证...
·
中国科大团队提出一种全新纳米药物递送模式
·
中国海洋大学与南京信息工程大学签署战略合作协...
·
天津大学校长柴立元寄语毕业生:行在天地间
·
多所新型研究型大学扩招,新增人工智能等热门专...
·
全球首次进行去骨瓣减压术前瞻研究
科 普
更多>>
·
顾方舟:选择活疫苗背后的“三笔账”
·
肽注射热潮背后暗藏隐忧
·
听南极考察队员讲述科考难忘瞬间
·
追忆“糖丸爷爷”:以身试药彰显一代科学家的使...
·
“本源悟空”完成超100万个全球量子计算任务
·
《科学》(20260611出版)一周论文导读
生命科学
我国自主知识产权低碳修复技术获国际...
我国科学家实现单神经元三模态完整解...
线粒体铺设“专线”为细胞核供能
贝加尔湖周边发现约5500年前最古老鼠...
医学科学
中国科大团队提出一种全新纳米药物递...
全球首次进行去骨瓣减压术前瞻研究
堪比内科医生,科学家开发医疗AI模型...
肽注射热潮背后暗藏隐忧
化学科学
科学家在高透明聚酰胺弹性体研究方面...
中国化学会-英国皇家化学会青年化学...
新型有机分子实现超窄带发光
武汉科技大学团队:向高而攀,摘取满...
工程材料
宁波大学在超高压超导材料研究领域取...
贾殿赠:探索煤炭里的“油气宝库”
由激光写入的磁存储材料切换数据提速...
我国著名建筑教育家、清华大学教授高...
科报快讯
更多>>
·
超高清有机发光二极管显示材料研究获重要进展
·
新研究揭示豆科植物再增2个新属
·
研究揭示食肉类和有蹄类动物保护成效与困境
·
小动物全脑功能成像技术获重要进展
·
依沃西双抗联合化疗显著延长耐药肺癌总生存
·
南海北部内潮调控叶绿素增长的作用机理获揭示
动态
更多>>
·
“北大科学Yeah!——科学文化沙龙”举行
·
10个优秀案例全景呈现绿色转型多元路径
·
2026年水电与新能源工程实用技术推广目录发布
·
第七届大数据、人工智能与软件工程国际学术会议...
·
荔枝采后病害防控研究获重要进展
·
国家艺术基金2026年度人才培训项目在广州大学启...
院 所
更多>>
·
计算流体力学与分子动力学自动智能模拟计算平台...
·
科学家在高透明聚酰胺弹性体研究方面取得新进展
·
轻夸克希格斯相互作用研究取得新进展
·
我国科学家实现单神经元三模态完整解析
·
多年冻土融化加速岩石风化可实现碳汇
·
他们用10年破解作物“午睡” 百年谜题
观 点
更多>>
·
智谱等中国大模型何时达到Fable级别水平?
·
徐宗本:数学是创新的源头活水和关键生产力
·
专访丘成桐:基础研究要给从0到1留有空间
·
姚檀栋:以加强基础研究打牢科技强国建设根基
·
同济大学校长杨金龙:越是技术革新,越需要人文...
·
告别“唯论文” 多校硕博凭实践成果获学位
信息科学
资深学者:错误数据被117篇论文以讹...
智谱等中国大模型何时达到Fable级别...
汉信微码技术启动国际标准化工作
AI对人类的理解已开始超越人类对AI的...
地球科学
她无氧登顶14座8000米级雪山,采集样...
科学家发现生态系统氮固持能力存在关...
自然资源部开展我国台湾岛以东管辖海...
岩石风化碳汇可部分抵消多年冻土融化...
数理科学
这只不起眼的书包,陪伴何泽慧十几年
计算流体力学与分子动力学自动智能模...
中科大团队在J/ψ光生过程中发现自旋...
轻夸克希格斯相互作用研究取得新进展
管理综合
正在直播|2026年中国科学院大学毕业典...
学术期刊“提质”,这项提升必选!
2025年度江苏省科学技术奖提名工作启...
《自然》(20260618出版)一周论文导...
每日全部新闻
一周新闻排行
1
《自然》(20260611出版)一周论文...
2
专访丘成桐:基础研究要给从0到1留...
3
多所“双一流”高校宣布本科扩招|...
4
扩招100人!广州大学今年本科招生7...
5
美气象机构宣布厄尔尼诺现象形成
6
张礼和:我最喜欢的,还是学生们叫...
7
武汉大学领导班子调整
8
他要把“人造太阳”变成现实
9
王树国:“学会数理化,走遍天下都...
10
九十二年前,这位清华女生这样选志...
新闻专题
更多>>
2026北京科学传播大赛 科学演讲赛道
2026北京市最美科技工作者
中国科学院杰出科技成就奖
2026两会科教观察
《中国科学报》
电子版
2026-6-18
1
2
3
4
科学网电子杂志
每周免费
友情链接
中国科学院大学
|
中国人教育网
美国LetPub专业编辑
中国医院科技影响力排行
意得辑
查尔斯沃思
AJE作者服务