|
|
|
|
|
利用气动人工肌肉作为结构“软-硬”致动器,在模块化蠕虫机器人中实现蠕动运动 | MDPI Biomimetics |
|
|
论文标题:Peristaltic Motion Enabled by Pneumatic Artificial Muscles (PAMs) as Structural “Soft–Stiff” Actuators in a Modular Worm-Inspired Robot
论文链接:https://www.mdpi.com/2313-7673/9/8/447
期刊名:Biomimetics
期刊主页:https://www.mdpi.com/journal/biomimetics
1. 引言
本文探讨了一种仿生蠕虫的“软-硬”型机器人原型—气动蠕动推进模块化机器人 (PALAM) 的设计、制造和测试。机器人采用模块化结构,模拟蚯蚓的节段性,每个节段均由一组三个气动人工肌肉 (PAM) 独立驱动,赋予机器人良好的柔韧性,使其能够应用于各种实际场景。
来自英国爱丁堡大学工程学院的Parvez Alam教授及其研究团队在 Biomimetics 期刊发表文章,设计了一种控制系统,成功制造了由四个节段组成的软体模块化机器人。软体模块化机器人能够实现双向蠕动运动,可以在许多搜救任务中展现出巨大的潜力。
2. 主要内容
机器人采用全模块化设计,由多个独立节段组成,可按线性顺序组装。如图1所示,该机器人的设计包含四个节段。每个节段包含三个气动人工肌肉 (PAM)、供气系统、将压缩空气输送至气动人工肌肉电子元件以及一个刚性连接板。
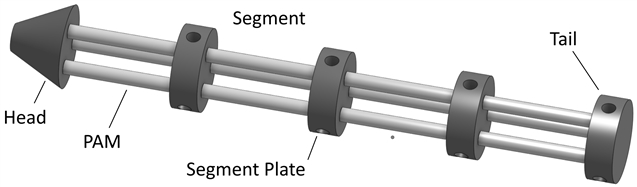
图1. 预期设计的示意图
机器人的成功运行依赖于材料的合理选择和有效操作。特别是气动人工肌肉驱动器,其成功运行尤其依赖于材料理论,因为其核心元件是单层膜。一个由四个驱动节段组成的蠕虫状机器人要完成一个完整的蠕动运动周期,必须经历五个运动阶段。每个阶段都依赖于各节段内的三个气动人工肌肉 (动力机械臂) 同时收缩,从而产生向内的拉力。节段的向内拉力必须在可接受的范围内才能成功实现蠕动运动——也就是说,它必须足以克服节段上的最大阻力,同时又不能超过任何其他静止收缩节段的锚定力。
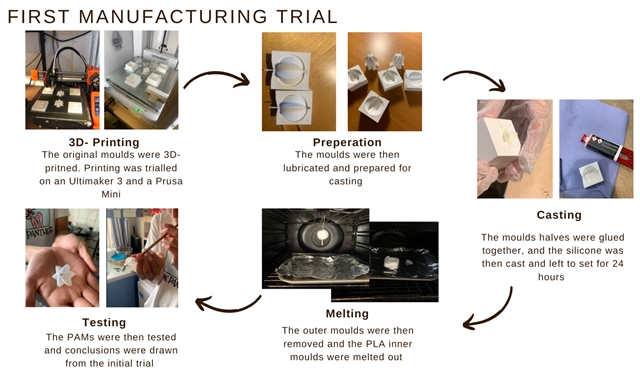
图2. 制造工艺的首次试验
对与整体组件分离的单个气动人工肌肉的运行性能进行了测试。在空载条件下,气动人工肌肉在约5 kPa的工作压力下达到最大充气量。超过此压力后,气动人工肌肉开始出现气球效应,向各个方向膨胀并伸长而非收缩。与其他方案相比,尺寸相同、厚度为1 mm的气动人工肌肉在类似的低压力 (约10 kPa) 下即可正常工作,而增加膜材料的刚度或厚度可以提高工作压力。

图3. 破裂的气动人工肌肉的照片
PALAM机器人在许多需要软体、柔性机器人的搜索行动中仍然展现出巨大潜力。其易于制造和简单的运动系统使其具有良好的可靠性和更少的故障点,使其成为在灰尘、水、高温和化学物质等环境因素下,能够抵御复杂机械系统快速损坏的理想选择。此外,使用多种时序对机器人进行了测试。机器人的工作台面为裸木材质 (无涂层)。每次测试持续一分钟,之后记录总位移,在机器人上显示了蠕动收缩步骤。

图4. 漂移式运动收缩过程在机器人上的展示
本研究的主要创新点在于将气动机械臂 (PAMs) 与分离板结合使用,从而实现蠕虫状机器人多个独立“模块”间的蠕动和非线性运动。迄今为止,利用软体气动驱动肌肉实现机器人蠕动的研究仅限于单一结构,例如:热冷却单根软纤维人工肌肉和单片折叠式软体结构。虽然这些结构也展现出了蠕动运动,但它们是单驱动结构。我们的机器人能够实现线性和非线性运动,由四个相互连接的模块组成,每个模块均可独立控制。
3. 文章总结
本文提出了一种由四个重复节段组成的软体模块化机器人,每个节段分别由三个人工肌肉进行气动驱动。成功制造了由四个节段组成的软体模块化机器人。这些节段能够成功地收缩和伸长,并能锚定在接触界面上,从而复制了蚯蚓的生物肌肉系统。因此,机器人能够实现双向蠕动运动,例如在不稳定的环境和难以进入的洞穴中导航。这种软体、灵活的机器人在许多搜救任务中展现出巨大的潜力。
原文出自Biomimetics 期刊:
Tinsley, B.; Caponi, S.; McAteer, L.; Nebesnyy, G.; Sammanthan, D.; Keza, E.S.; Alam, P. Peristaltic Motion Enabled by Pneumatic Artificial Muscles (PAMs) as Structural “Soft–Stiff” Actuators in a Modular Worm-Inspired Robot. Biomimetics 2024, 9, 447.
Biomimetics期刊介绍
主编:Stanislav N. Gorb, Kiel University, Germany
期刊致力于研究生物体的最基本方面及其特性向人类应用的转移。期刊旨在为材料科学、机械工程、纳米技术和生物医学领域的研究人员和专业人士提供一个平台,通过在工程系统、技术和生物医学中利用生物启发的设计,开发实现可持续创新的解决方案。
|
2025 Impact Factor
|
4.2
|
|
2025 CiteScore
|
6.2
|
|
Time to First Decision
|
17 Days
|
|
Acceptance to Publication
|
3.8 Days
|
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






