|
|
|
|
|
调优CNN-LSTM模型的智能防碰撞系统研究 | MDPI Smart Cities |
|
|
论文标题:Intelligence Collision Detection Using a Combination of Tuning Base Methods and Convolutional Long Short Term Memory Models
论文链接:https://doi.org/10.3390/smartcities9040061
期刊名:Smart Cities
期刊主页:https://www.mdpi.com/journal/smartcities
近日,韦恩州立大学电气与计算机工程系的Mohammed Hilfi博士与Lubna Alazzawi博士在Smart Cities期刊发表了一项最新研究成果。该研究针对城市交通中行人与骑行者等弱势道路使用者(VRUs)面临的碰撞风险,提出了一种结合超参数调优策略与深度学习架构的智能防碰撞检测系统。研究团队深入对比了双向长短期记忆网络(Bi-LSTM)、卷积神经网络与LSTM结合模型(CNN-LSTM)以及Transformer模型在“鬼探头”及车辆-摩托车碰撞场景中的表现。结果表明,经过网格搜索优化的CNN-LSTM模型在行人碰撞检测中准确率高达99.76%,在车辆-摩托车碰撞检测中准确率达99.58%,显著优于现有模型。该系统具备在边缘计算设备上实时运行的潜力,可为自动驾驶和智能交通系统提供可靠的早期预警解决方案。
一、引言
随着自动驾驶技术的普及,确保所有道路使用者的安全成为核心议题。据统计,全球每年因道路交通事故造成约119万人死亡,其中行人、骑行者等弱势道路使用者(VRUs)占比超过一半。如何利用人工智能技术处理车辆组网(V2X)产生的海量时序数据,精准识别潜在的碰撞风险,是当前智能交通领域的研究热点。
然而,现有的碰撞检测模型往往面临数据不平衡、误报率高以及计算复杂度大等挑战。特别是Transformer等模型在处理长序列时序数据时,计算成本高昂且容易出现注意力分散;而传统的机器学习方法在处理高维特征时表现不佳。为此,研究团队旨在开发一种轻量化、高精度且具备实时预测能力的碰撞检测框架。
二、材料与方法
本研究构建了两种典型的高风险碰撞场景进行模拟与验证:
1. 场景A(违规穿越):模拟行人在两辆停放的车辆之间突然出现(即“鬼探头”),与正常行驶车辆发生冲突的场景。
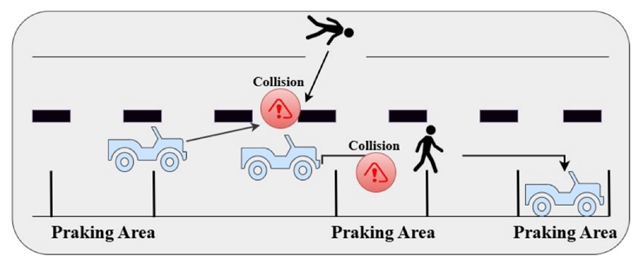
图1 场景A 违规穿越
2. 场景B(车辆-摩托车碰撞):模拟车辆与摩托车在十字路口交汇处可能发生的碰撞,包含两种不同的路径冲突模式(B1和B2)。
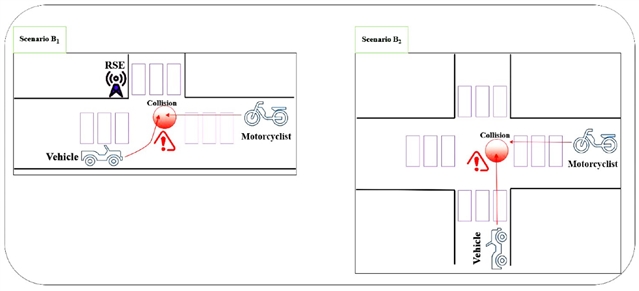
图2 场景B车辆-摩托车碰撞
研究团队利用SUMO交通仿真软件与VEINS网络仿真工具,基于基本安全消息(BSM)生成了包含位置、速度、加速度等特征的高保真数据集。针对数据极度不平衡(碰撞样本极少)的问题,研究采用了时间序列合成少数类过采样技术(T-SMOTE)来优化数据分布。
在模型构建阶段,研究团队重点评估了三种深度学习架构:
(1)双向LSTM(Bi-LSTM):利用双向记忆单元捕捉前后文的时间依赖。
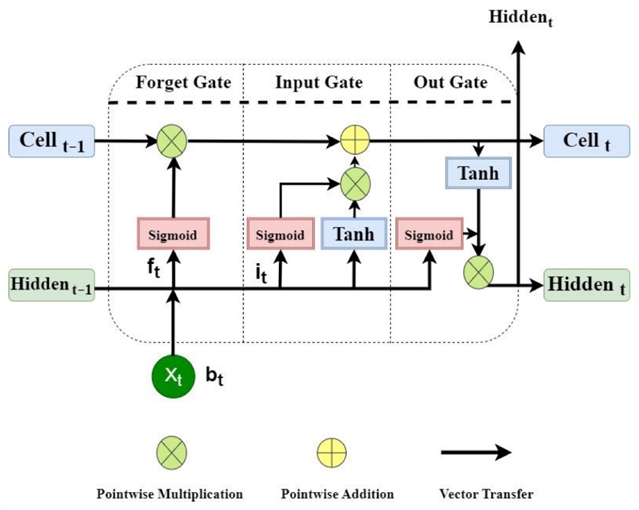
图3 LSTM 架构模型
(2)CNN-LSTM:利用卷积层提取空间/局部特征,结合LSTM捕捉时间序列依赖关系。
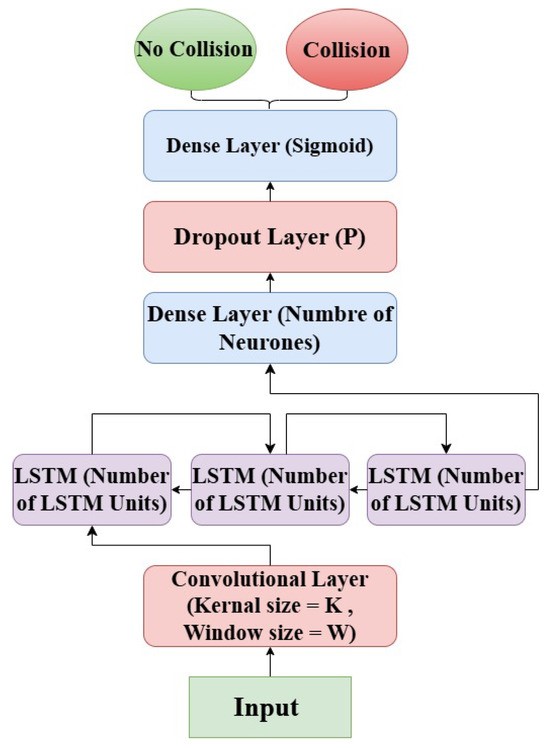
图4 CNN-LSTM 架构模型
(3) Transformer:利用自注意力机制处理序列数据。
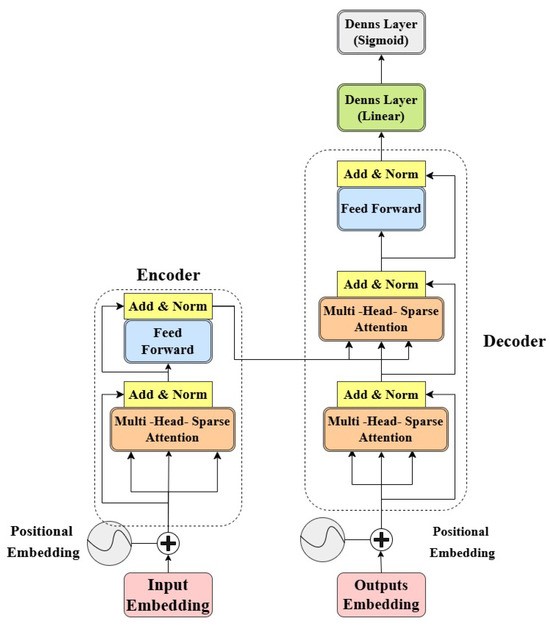
图5 Transformer 架构模型
为了找到最佳模型配置,研究采用了网格搜索(Grid Search)和随机搜索(Random Search)两种超参数调优策略,重点优化了批次大小、学习率、Dropout率等关键参数,以最大化真阳性率并最小化误报率。
三、分析与结果
研究结果显示,经过优化的 CNN-LSTM 模型在大多数指标上表现最佳,显著优于单纯的LSTM或Transformer模型。
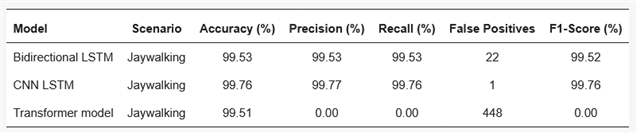
1. 违规穿越(场景A): CNN-LSTM 模型表现最佳,达到了 99.76% 的准确率、99.77%的精确率和99.76%的召回率。相比同类研究,准确率提升了约3.7%。
表1 违规穿越(场景A)相关指标
2. 车辆-摩托车碰撞检测(场景B):在更复杂的摩托车场景中,不同模型在不同子场景中表现各异,但总体趋势依然显示混合模型的优势。在B1子场景中,CNN-LSTM 模型以 99.58% 的准确率胜出;而在B2子场景中,双向LSTM 模型表现更优,准确率达到 99.73%。
表2 车辆-摩托车碰撞检测(场景B)相关指标
3. 误报率控制: 相比于对比研究中高达39次的误报,本研究提出的优化模型将误报率大幅降低至7次(场景B1)和6次(场景B2),有效减少了不必要的系统干预。
4. 实时性与鲁棒性: 模型在引入高斯噪声和模拟真实通信延迟的环境下仍保持稳健。CNN-LSTM模型在1000次实例推理中仅需2毫秒,完全满足边缘设备实时处理的需求。
四、讨论
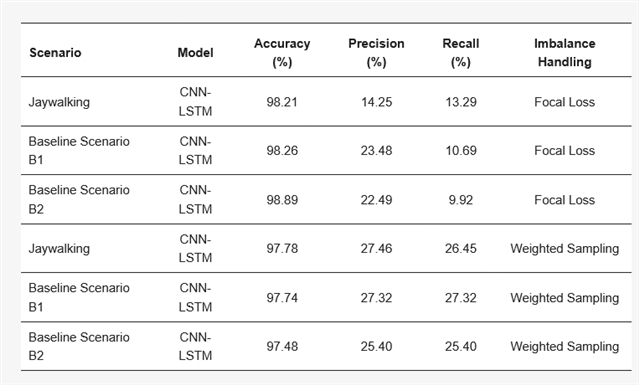
研究表明,结合了特征提取能力(CNN)和时间记忆能力(LSTM)的混合模型,配合T-SMOTE采样技术,在处理极度不平衡的碰撞数据时具有显著优势。该系统不仅能准确检测当前的碰撞风险,还能预测未来5步甚至10步时间序列后的碰撞可能性(虽然预测步数增加会导致精度略有下降,但仍保持在90%以上),可作为早期碰撞预警系统。该模型可以集成到智能交通管理系统中,通过V2X通信,帮助自动驾驶车辆在复杂城市环境中做出更安全的决策。这项研究证明了CNN-LSTM 架构在解决特定交通安全隐患(尤其是针对弱势道路使用者)方面的巨大潜力,为未来自动驾驶汽车的防碰撞系统提供了高效、低误报率的技术方案。
引用格式:
Hilfi, M.; Alazzawi, L. Intelligence Collision Detection Using a Combination of Tuning Base Methods and Convolutional Long Short Term Memory Models. Smart Cities 2026, 9, 61
期刊介绍
主编:Prof. Dr. Pierluigi Siano, University of Salerno, Italy
Smart Cities(ISSN 2624-6511)是一本由 MDPI 出版的国际型开放获取同行评审英文学术期刊,专注于发表智慧城市领域的最新研究进展,目前已被 ESCI、Scopus、PubMed、Dimensions以及DOAJ 等重要数据库收录。Smart Cities发文领域包括但不限于智慧城市的核心技术与方法、智慧城市的关键应用领域、智慧城市交叉领域融合以及韧性智慧城市建设等,重点关注利用先进的信息技术、通信技术及数据分析工具,推动城市资源优化配置、公共服务改善、管理效率提升及居民生活质量提高等议题的原创论文,综述、通讯等类型,致力于为智慧城市相关研究提供一个优质、高效、快速的发表服务平台,有效促进智慧城市最新科研成果的推广和传播,加快推进智慧城市新生态建设。
2024 Impact Factor: 5.5
2025 CiteScore: 13.0
Time to First Decision: 25.5 Days
Acceptance to Publication: 3.9 Days
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。