|
|
|
|
|
FASE 亮文解读丨复杂背景下红薯抓握点识别:显著性目标检测新方案 |
|
|
论文标题:Sweet potato grasping point recognition in complex backgrounds: a method based on salient object detection
期刊:Frontiers of Agricultural Science & Engineering
作者:Ranbing YANG, Ang ZHAO, Danyang LV, Yongfei PAN, Hongfei ZHU, Xinyu GUO, Jian ZHANG, Jianqi HOU
发表时间:8 Sept 2025
DOI:10.15302/J-FASE-2025653
微信链接:点击此处阅读微信文章
Apr 2026, Volume 13 Issue 2
· 第7篇 ·
▎论文ID
Sweet potato grasping point recognition in complex backgrounds: a method based on salient object detection
复杂背景下红薯抓握点识别:显著性目标检测新方案
文章类型:Research Article
第一作者:杨然兵
通讯作者:张健
Email: zhangjian_qau@163.com
作者单位:海南大学机电工程学院
Cite this article :
Ranbing YANG, Ang ZHAO, Danyang LV, Yongfei PAN, Hongfei ZHU, Xinyu GUO, Jian ZHANG, Jianqi HOU. Sweet potato grasping point recognition in complex backgrounds: a method based on salient object detection. Front. Agr. Sci. Eng., 2026, 13(2): 25653 DOI:10.15302/J-FASE-2025653
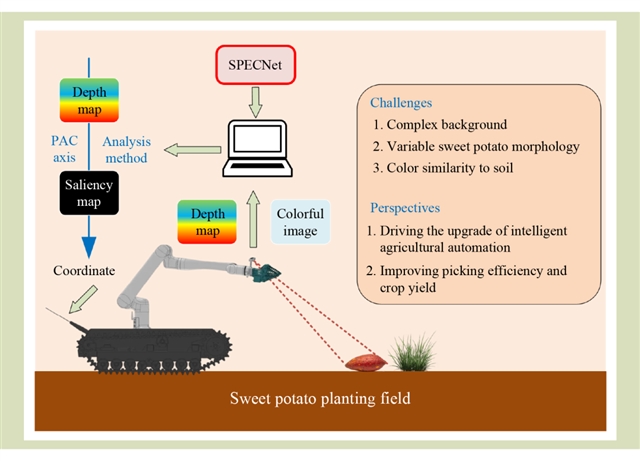
· Graphical abstract ·
· 主 要 内 容 ·
红薯是全球重要的粮食作物,营养丰富,广泛应用于食品加工、饲料生产和医药行业。我国海南省种植红薯已有300多年历史,是南方红薯主产区之一。然而,海南地形以中部山地为主,逐渐过渡到丘陵、梯田和平原,形成环形地貌,大型农业机械难以在这些区域作业,红薯收获长期依赖人工,效率低且劳动强度大。农业机器人的发展为解决这一问题带来了希望,但现有机器人视觉系统在复杂收获环境中,常面临红薯与背景 (如土壤、杂草、石块) 分割不清、抓握点定位适应性不足的挑战。如何让机器人在复杂背景下准确识别红薯轮廓并找到最佳抓握点,成为提升红薯收获机械化水平的关键问题。
海南大学机电工程学院张健副教授等以BASNet网络为基础,提出了一种名为SPECNet的红薯轮廓识别模型。该模型通过三项关键改进提升性能:首先,将标准卷积替换为动态卷积,使网络能根据图像内容自适应调整过滤器,更好捕捉红薯多样的形状特征;其次,引入Haar小波下采样模块,在降低特征图分辨率的同时保留更多细节信息,增强多尺度特征提取能力;最后,改进了标准的SE注意力机制,加入边缘引导模块形成ESE注意力机制,更有效地捕捉和强调红薯的边缘信息,提升轮廓检测精度。
实验结果显示,SPECNet模型优于ACCoNet、U2-net、BASNet等六种主流对比模型。当输入图像分辨率提升至512 × 512时,模型性能进一步提高,表明其在复杂背景下的红薯轮廓识别精度显著高于现有方法。
为验证实际应用效果,研究团队将模型部署到红薯采摘机器人平台。机器人配备深度相机获取颜色和深度图像,通过模型提取红薯轮廓,计算质心作为抓握点,并利用主成分分析确定抓握方向。实验在室内沙地、田间和草地三种环境下进行,覆盖不同形状的红薯 (细长型、粗短型、紧凑型),并在早、中、晚不同光照条件下测试。结果显示,模型实时处理速度达35帧/秒,整体抓握成功率为78%。其中,细长型红薯抓握成功率最高,粗短型和紧凑型因形态与机械手匹配度问题成功率较低。尽管田间杂草和枯叶等干扰会影响识别精度,但模型在不同光照条件下表现稳定,显示出较强的环境适应性。
本研究为红薯收获机器人的视觉系统提供了高效解决方案,有助于提升红薯收获的机械化水平,减轻人工劳动强度,尤其适合海南等地形复杂地区的需求。
· 主 要 图 表 ·
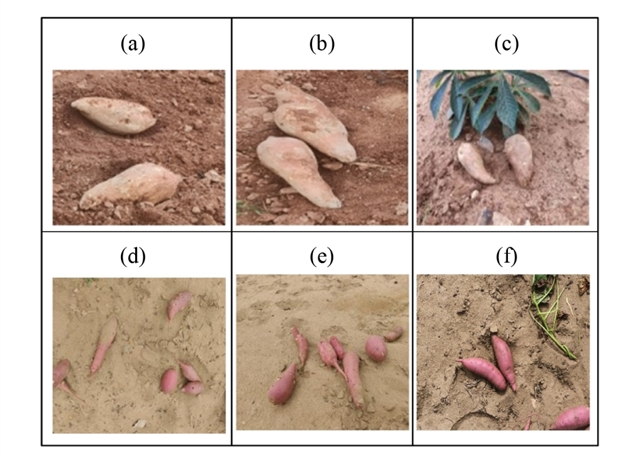
图1 不同特征的红薯图片:(a, d) 土壤覆盖;(b, e) 边缘重叠;(c, f) 两种背景 (红土和沙土) 下的环境干扰。
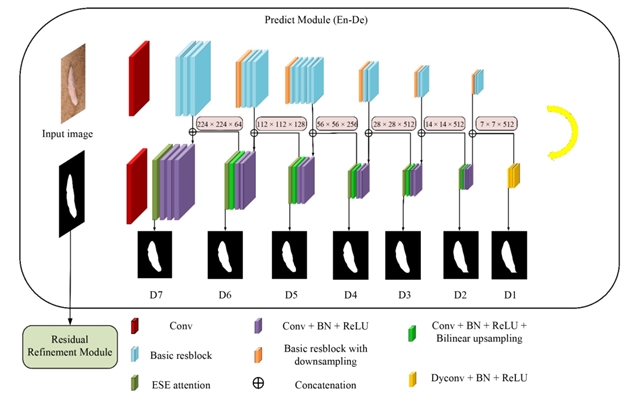
图2 SPECNet模型。D1–D7表示每次编码-解码过程后解码器的输出步骤图,最终输出传递到残差细化模块进行二次特征提取。
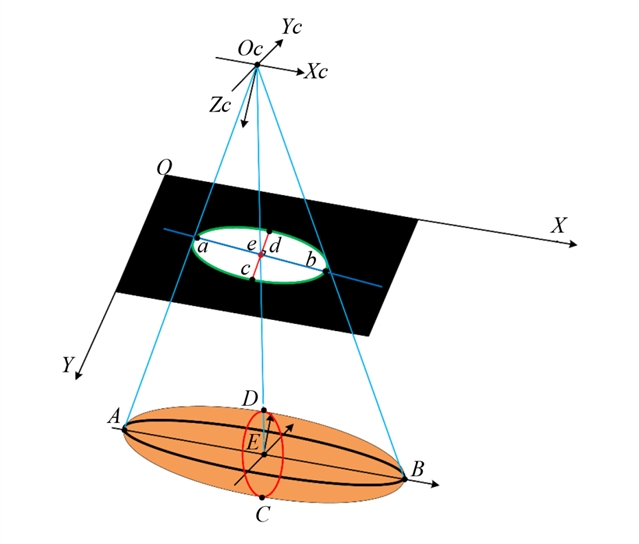
图3 红薯抓握点识别示意图。
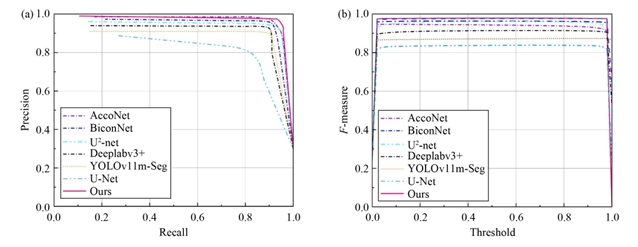
图4 本文模型与六种对比模型的 (a) 精确率-召回率曲线和 (b) F-measure阈值曲线。
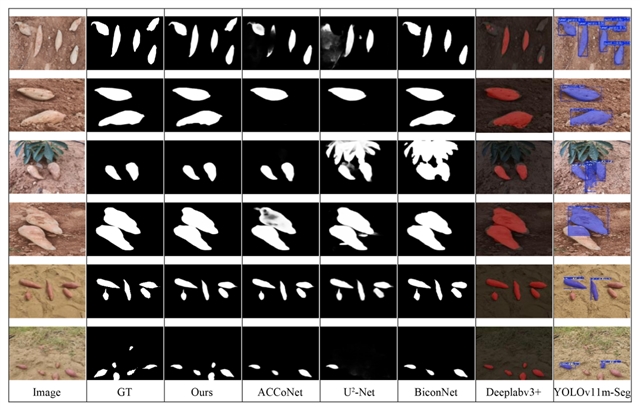
图5 本文模型与其他六种模型的结果定性比较。
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。