|
|
|
|
|
莫干山地信实验室陈军院士课题组——TopoFarm:一个用于耕地私挖乱采场景表示的拓扑标注全景数据集 | MDPI ISPRS IJGI |
|
|
论文标题:TopoFarm: A Topology-Annotated Panoptic Dataset for Unauthorized Farmland Excavation Scene Representation
论文链接:https://www.mdpi.com/2220-9964/15/3/93
期刊名:ISPRS International Journal of Geo-Information
期刊主页:https://www.mdpi.com/journal/ijgi
耕地保护是保障粮食安全与生态稳定的重要基础。然而,随着城镇化进程加快,耕地私挖乱采行为日益频发,给实时监测带来严峻挑战。现有计算机视觉研究多聚焦于识别场景中的物体,却较少关注物体之间空间拓扑关系的结构化建模,而这种关系正是判断挖掘设备是否侵入耕地的重要空间证据。为弥补这一研究空缺,莫干山地信实验室陈军院士课题组近日在国际期刊ISPRS International Journal of Geo-Information(ISPRS IJGI)发表最新研究成果。研究团队提出面向耕地私挖乱采场景的人机协同混合智能拓扑全景标注方法(Human-in-the-Loop Hybrid Intelligent Topological Panoptic Annotation,HITPA),并据此构建了首个拓扑标注全景数据集TopoFarm。该研究通过融合自动算法与专家知识,实现复杂工程场景中高质量、高效率的拓扑关系标注,为拓扑感知研究提供了新的技术路径。
研究过程与结果
在单目视频监控场景中,拓扑关系推理面临不同于传统 GIS 矢量空间分析的挑战。由于透视投影引起的遮挡效应、深度模糊和边界不确定性,二维图像中的物体重叠并不一定对应三维空间中的真实接触。例如,在倾斜视角下,高大物体可能在图像中“覆盖”地面,但在真实空间中二者并未接触。因此,影像环境中的拓扑关系需要经历从栅格影像空间到二维场景空间,再到三维场景空间的逐层推理过程。这种从像素表达到真实空间关系的认知鸿沟,构成了方法设计的理论起点。
针对这一问题,研究团队借鉴智能测绘领域的混合智能计算范式,提出 HITPA 人机协同标注框架。该框架通过自动算法与人工知识协同工作,由算法生成初始结构化结果,再由领域专家进行语义与空间逻辑校正,从而在效率与准确性之间取得平衡。整体流程包含两条相互衔接的技术路径。
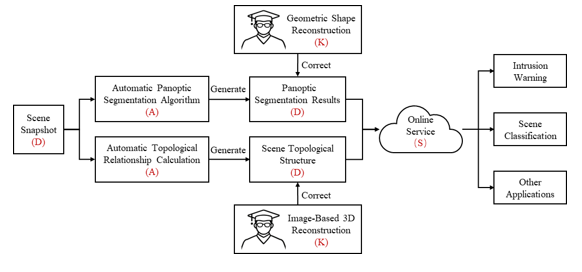
图1 面向耕地私挖乱采场景的全景分割与拓扑关系标注总体策略(K:知识;D:数据;A:算法;S:服务)。
首先,在几何形态知识约束下实现全景分割标注。研究构建层次化全景分割框架,模拟地理实体从语义概念到空间定位再到几何形态的逐步细化过程。在语义层,通过 GroundingDINO 与 CLIPSeg 等视觉语言模型完成文本引导的目标检测和语义分割;在定位层,通过边界框和概率图获取空间位置信息;在几何层,利用 Segment Anything Model 实现精细分割并输出统一的全景结果。在此基础上,引入超像素级语义校正机制,通过 SLIC 算法将人工修正单元从像素级提升到超像素级,显著降低人工成本。随后,领域专家在几何形态知识指导下完成语义补全与重标注,例如利用道路连续性、物体尺度比例及阴影投射关系等先验信息优化分割结果。
在获得高质量全景分割结果后,研究进一步开展拓扑关系标注。首先将专家校正后的物体掩模矢量化,并通过拓扑运算生成初始二维关系;随后利用 DepthAnything 模型获取单目深度估计,用于识别物体之间的深度层次差异。专家基于相机投影知识进行验证:一方面通过遮挡分析判断视觉重叠是否由高度差或投影效应造成,避免将投影性重叠误判为真实接触;另一方面通过常识检验排除语义不合理的关系,例如在耕地私挖乱采场景中,挖掘机与建筑物通常不存在直接接触。
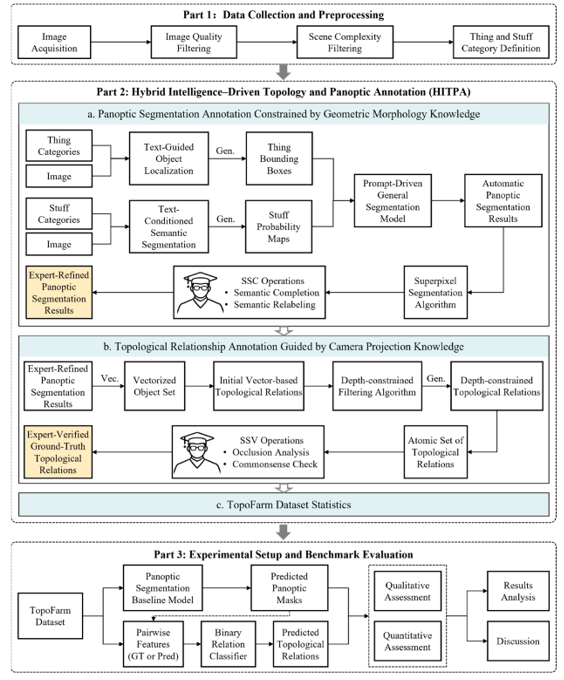
图2.人在回路的拓扑标注全景数据集构建流程。浅黄色节点分别代表全景分割标注结果和拓扑关系推理标注结果,这两部分共同构成 TopoFarm 数据集。
基于上述方法,研究团队构建了 TopoFarm 数据集,并在此基础上开展了全景分割与拓扑关系推理的基准实验,同时设计层级化评估协议并分析物体级分割质量对关系推理性能的影响。实验结果表明,即使在使用真实标注作为输入的理想条件下,拓扑关系推理仍具有较高难度,精确率与召回率之间存在明显权衡。值得注意的是,复杂场景反而能够提供更多上下文约束,使模型预测更加稳定,表明拓扑关系推理对全局场景语境具有显著依赖性。
研究总结
总体而言,HITPA 方法为复杂工程监控场景中的空间拓扑关系标注提供了一种兼顾精度与效率的实用范式。该方法融合自动全景分割、单目深度估计以及专家几何与投影知识,通过“算法预标注—专家校正—一致性验证”的闭环流程,有效提升了复杂影像环境下拓扑标注的可靠性。研究面向智能化测绘与耕地保护应用需求,为从二维影像推理三维空间拓扑关系提供了新的数据基础和方法参考,并为更高层次的场景认知、关系推理和空间决策研究奠定了基础。
作者简介:
• 第一作者
姓名:尹顺玺博士研究生
机构:中国矿业大学
研究方向:智能化测绘、时空场景认知
邮箱:yshunxi@gmail.com
• 通讯作者
姓名:刘万增教授
机构:国家基础地理信息中心
研究方向:GIS空间关系、应急制图及知识服务
邮箱:lwz@ngcc.cn
• 作者
姓名:陈军院士
机构:莫干山地信实验室
研究方向:时空信息建模、更新与服务
邮箱:chenjun@ngcc.cn
• 作者
姓名:任加新博士
机构:莫干山地信实验室
研究方向:智能化测绘、时空场景认知
邮箱:jaycecd@foxmail.com
• 作者
姓名:张嘉栋博士研究生
机构:中南大学
研究方向:智能化测绘、实景三维
邮箱:zjdgis@csu.edu.cn
ISPRS International Journal of Geo-Information 期刊介绍
主编:Wolfgang Kainz, University of Vienna, Austria
期刊主题涵盖地理信息科学和技术各个方面,主要包括空间数据模型与管理、空间分析与决策、地理空间人工智能、地图制图、空间数据基础设施、地理空间网络、志愿地理信息、基于位置的服务、轨迹分析、智慧城市和前沿地理空间应用等。
|
2024 Impact Factor
|
2.8
|
|
2024 CiteScore
|
7.2
|
|
Time to First Decision
|
33.1 Days
|
|
Acceptance to Publication
|
2.7 Days
|
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。