|
|
|
|
|
开发PMSM速度调节的统一框架—通过广义PI控制进行主动抗扰控制 | MDPI WEVJ |
|
|
论文标题:Developing a Unified Framework for PMSM Speed Regulation: Active Disturbance Rejection Control via Generalized PI Control
论文链接:https://www.mdpi.com/2032-6653/16/4/193
期刊名:WEVJ
期刊主页:https://www.mdpi.com/journal/wevj
引言
永磁同步电机 (PMSM) 因其高扭矩密度和低维护需求,在工业应用中备受青睐。然而,传统的比例积分 (PI) 控制器在速度调节中存在明显局限性,尤其是在跟踪性能和抗干扰能力之间的权衡上。主动抗扰控制 (ADRC) 因其简单性和高效性逐渐成为研究热点,然而它的广泛应用仍面临两大挑战:一是缺乏直观的等效分析以明确其相对于PI控制的优势;二是扩展状态观测器 (ESO) 结构选择的复杂性。
此前,World Electric Vehicle Journal 期刊上发表了题为“Developing a Unified Framework for PMSM Speed Regulation: Active Disturbance Rejection Control via Generalized PI Control”的研究论文,提出了一种基于广义PI控制结构的ADRC等效模型,为上述问题提供了创新性解决方案。
主要内容
该论文聚焦于ADRC与广义PI控制之间的等效关系,构建了一个统一框架,涵盖高阶ESO (HESO) 和级联ESO (CESO) 等多种观测器结构。通过机理建模和频域分析,将ADRC系统转化为广义PI控制形式,揭示了ADRC内置的瞬态响应机制和低通滤波器 (LPF) 特性。具体而言:
等效模型构建:通过频域变换,证明了ADRC在采用不同阶数ESO时可等效为P、PI或PII2控制器,而高阶ESO引入更高阶的LPF可以显著提升噪声抑制能力。例如,二阶ESO等效为带一阶LPF的PI控制器,而四阶ESO则等效为带二阶LPF的PII2控制器。
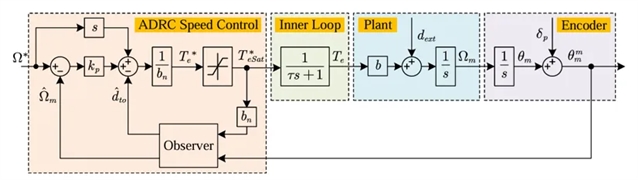
图1. 用于PMSM速度调节的ADRC系统框图。
观测器统一框架:系统分析HESO与CESO的等效关系,提出当CESO的首个观测器为一阶时,其整体行为等效于一阶ESO;若首个观测器为二阶或更高阶,则CESO的阶数为各观测器阶数之和。这一发现为观测器设计提供了明确的指导原则。
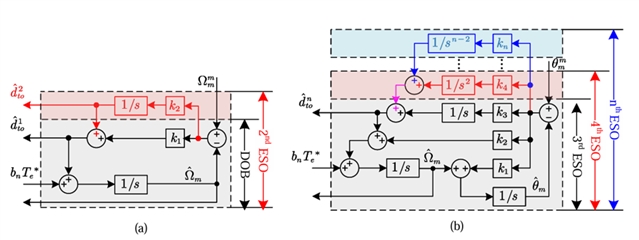
图2. 不同ESO的框图:(a) DOB和二阶ESO;(b) 三阶和更高阶的ESO。
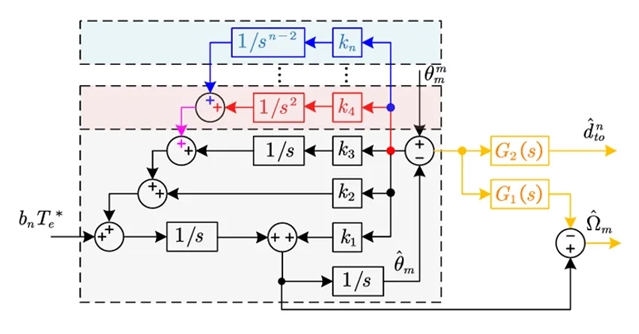
图3. 广义n阶GPIO的框图。
性能优化:通过频域和时域实验对比ADRC与传统PI控制、不同观测器结构的性能差异,验证了ADRC在抗干扰和噪声抑制方面的优越性。例如,在负载阶跃变化时,ADRC能显著降低速度波动,且高阶ESO进一步提升了系统的动态响应和鲁棒性。
实验结果
实验部分基于dSPACEDS1202 Micro Lab Box测试平台,对比了ADRC与广义PI控制器在不同工况下的性能:
抗干扰能力:在500 r/min运行时施加阶跃负载,ADRC与PI控制器均能消除稳态误差,但ADRC (尤其是三阶ESO) 表现出更小的速度波动。
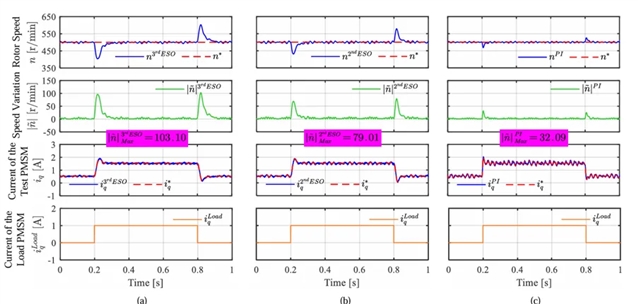
图4. 使用差分控制方法,阶跃载荷变化的系统响应低于500 r/min:(a) 具有三阶ESO的ADRC;(b) 具有二阶ESO的ADRC;(c) PI控制器。
噪声抑制:高阶ESO通过引入高阶LPF,将噪声衰减率从-40 dB/dec提升至-80 dB/dec,显著改善了系统稳定性。
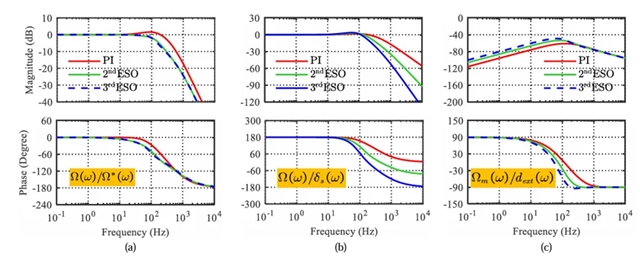
图5. ADRC的PMSM波特图对比:(a) 速度参考跟踪;(b) 噪音抑制;(c) 干扰抑制。
观测器对比:CESO22与四阶GPIO在阶跃和斜坡负载下表现相似,但传统四阶ESO在抗干扰能力上更优,验证了理论分析的准确性。
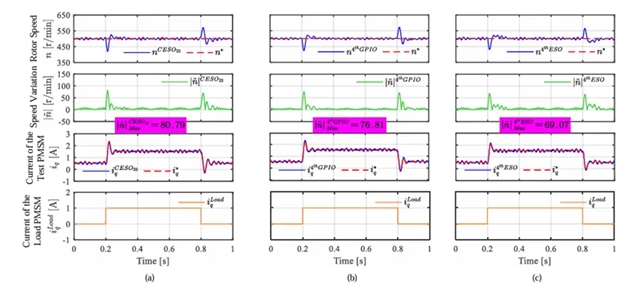
图6. 使用差分控制方法,阶跃载荷变化的系统响应低于500 r/min:(a) 具有三阶ESO的ADRC;(b) 具有二阶ESO的ADRC;(c) PI控制器。
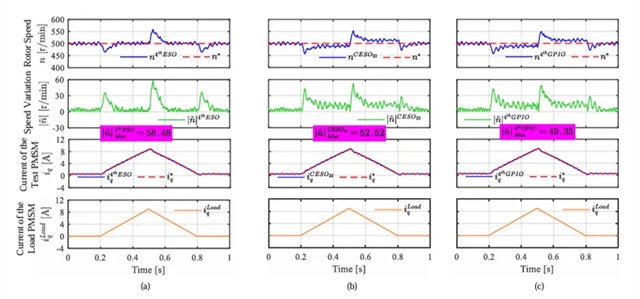
图7. 系统响应低于500 r/min,使用不同的控制器进行阶跃负载变化:(a) 具有四阶ESO的ADRC;(b) PI控制者;(c) PII2控制器。
该论文通过建立ADRC与广义PI控制的统一框架,解决了观测器设计复杂性问题,为PMSM速度调节提供了兼具理论深度与工程实用性的解决方案。揭示了ADRC的广义PI本质,简化控制器设计与调参过程;建立高阶与级联ESO的等效关系,推动观测器结构的标准化;实验验证了ADRC在强扰动、高噪声环境下的优异性能,为其在电动汽车、工业机器人等领域的应用奠定基础。
随着智能制造与新能源技术的发展,该框架有望成为下一代高精度电机控制的核心技术,助力提升系统鲁棒性与能效水平。
引用格式:
Wang, H.; Zuo, Y.; Zhao, C.; Lee, C.H.T. Developing a Unified Framework for PMSM Speed Regulation: Active Disturbance Rejection Control via Generalized PI Control. World Electr. Veh. J. 2025, 16, 193.
WEVJ 期刊简介
主编:Joeri Van Mierlo, Vrije Universiteit Brussel, Belgium
WEVJ(ISSN 2032-6653)是首个全面涵盖电池电动汽车、混合动力电动汽车和燃料电池电动汽车相关研究的同行评审国际科学期刊。为响应学术界的需求,本刊旨在与国际电动汽车研讨会暨展览会(EVS)相辅相成。自1969年创办以来,国际电动汽车研讨会暨展览会(EVS)系列活动始终走在电动汽车领域的前沿,并已发展成为全球规模最大、最具影响力的电动汽车行业、学术界和研究盛会,展示了市场上已有的以及正在研发中的新兴技术。
2024 Impact Factor: 2.6
2024 CiteScore: 5.0
Time to First Decision: 21 Days
Acceptance to Publication: 3.8 Days
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。