|
|
|
|
|
东南大学宋爱国教授团队:微型水下机器人驱动与运动模式综述 Engineering |
|
|
论文标题:Actuation and Locomotion of Miniature Underwater Robots: A Survey
期刊:Engineering
DOI:https://doi.org/10.1016/j.eng.2024.10.022
微信链接:点击此处阅读微信文章
1. 文章导读:
微型水下机器人(MUR)以其体积小、隐蔽性好、环境适应性强等特点,在海洋观测、设备巡检、公共安全与生命科学等领域展现出广阔的应用前景。然而,这类机器人在走向实际应用的过程中,仍面临诸多技术挑战:既要在狭窄空间和复杂流场中实现高效推进与精准控制,又要克服能量有限、通信带宽不足,以及微型化制造与集成等方面的瓶颈。为了解清楚其发展路径,该文系统回顾了近年来 MUR 领域的代表性研究成果。该文从驱动机理入手,将现有技术划分为电机驱动、磁场驱动、压电驱动与软体材料驱动四类主流方式,并围绕单位运输能耗(COT)、速度、尺寸/载荷比和可控性等关键指标,对其性能展开横向比较。在运动模式方面,该文总结了仿鱼摆动、喷射、划桨、爬行、鞭毛式及混合模式等不同策略的适用场景与优势。
基于上述分析,该文进一步提炼出当前MUR在电源与无线供能、低功耗控制算法、耐腐蚀柔性材料以及群体协同与自主导航等关键环节存在的共性挑战与发展趋势。希望该文所梳理的“方法性能场景”对应关系,能够为相关领域的研究者提供一份清晰的技术路线参考,也为下一代更高效、更可靠、更智能的 MUR 的研发提供思路借鉴。
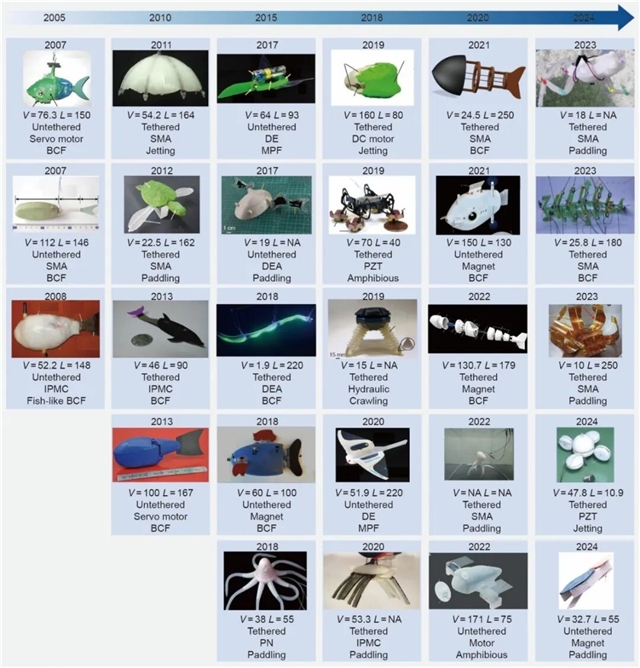
图1 代表性微型水下机器
2. 研究内容:
该文围绕“驱动机理运动模式性能评估应用趋势”这一主线展开。该文首先构建了一套适用于微型水下机器人(MUR)的统一分析体系,选取单位运输能耗(COT)、体长归一化速度(BL/s)、尺度/载荷比和可控性等关键参数,对近年来具有代表性的样机及相应实验数据进行了归纳,为后续不同技术路线之间的比较与场景适配建立了量化基础。
在驱动技术方面,该文详细分析了以直流电机与电磁驱动为代表的传统刚性执行器,以及基于形状记忆合金(SMA)、介电弹性体(DEA)和离子聚合物金属复合材料(IPMC)等柔性智能材料的驱动方式。分析表明,刚性驱动在运动速度与动态机动性方面具有明显优势;而智能材料驱动则更易实现系统的小型化、环境适应性好,并有助于结构集成。但是智能材料驱动的实际应用仍受限于响应频率、变形精度与长期稳定性等问题。此外,针对无线化与小型化的发展需求,该文也对光、热、磁等远程驱动方式进行了探讨,重点分析了其在能量密度与系统复杂度之间所需实现的平衡。
在运动模式方面,该文将现有研究方案归纳为仿鱼摆动、喷射、划桨、爬行、鞭毛式及多种模式混合等主要类型。针对不同模式所对应的流固耦合特性与工作环境,该文深入比较了多种 MUR 在穿越狭窄空间、高黏性介质运动以及非定常涡街干扰等复杂条件下的适应能力与控制潜力。该文特别指出,“驱动结构控制”三者协同设计的重要性——通过柔性材料带来的被动适应能力,再结合闭环控制所提供的主动调节机制,可在微小型尺度下有效兼顾推进效率与运动姿态的稳定。
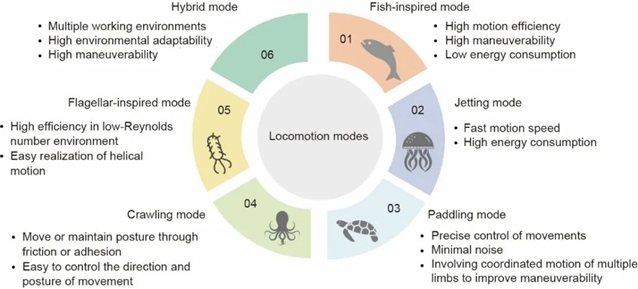
图2 微型水下机器人的典型运动模式
在性能与场景的匹配层面,该文总结了当前MUR面临的几项共性挑战,主要包括微型电源与无线供能技术、低功耗高鲁棒控制器、耐腐蚀抗疲劳的材料与封装工艺、复杂流场中推进稳定性与感知能力的协同,以及多机协同与自主导航系统的实现。面向下一代MUR的发展,该文提出了三条可能的技术路径:一是发展可重构与模块化的执行器及机构,通过增加系统自由度以提升其在多变环境中的适应能力;二是推动感知与学习相结合的智能控制策略,使机器人能够学习并利用外部环境,实现运动模式的自主调整与切换;三是探索跨介质两栖机器人的设计思路,旨在突破其在淤泥、礁石、冰水交界等复杂地形中的移动与作业限制,并推动相关技术在真实海洋环境中实现群体协同应用。
3. 研究总结:
该文系统梳理了微型水下机器人(MUR)在驱动机理与运动模式两个层面的技术进展。通过对电机/电磁、磁场、压电与软体材料四类执行器,以及仿鱼摆动、喷射、划桨、爬行、鞭毛与混合等多种运动模式的量化比较,明确了不同技术路线的性能边界与适用条件。在此基础上,该文进一步归纳出当前MUR在微型化供能、材料与封装可靠性、低功耗鲁棒控制以及非定常流场中运动稳定性等方面存在的技术难题。
最后,该文展望了可重构模块化、感知学习控制一体化以及两栖协同三条未来发展路径,期望能为后续微型水下机器人的方案设计、性能测试与工程应用提供系统性的思路与实践参考。
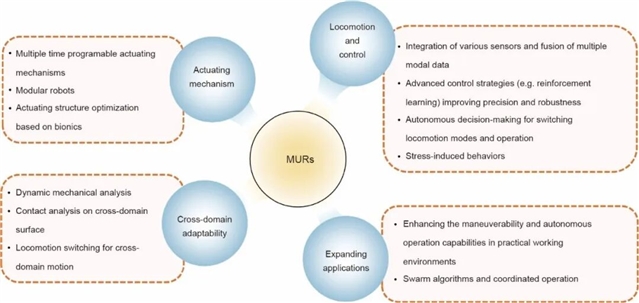
图3 从驱动机制、运动与控制、跨领域适应性和实际应用等方面探讨MUR面临的挑战和发展趋势
论文信息:
Panbing Wang, Xinyu Liu, Aiguo Song. Actuation and Locomotion of Miniature Underwater Robots: A Survey. Engineering, 2025, 51(8): 195-214 DOI:10.1016/j.eng.2024.10.022
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






