导读
月壤样品对研究月球的组成与起源有着极大的科学意义,月表采样则是嫦娥六号任务实现月背样品采集的关键步骤。针对月表采样工作环境复杂、采样时间窗口窄和可靠性要求高等约束,北京航空航天大学屈玉福教授团队联合中国空间技术研究院嫦娥六号任务团队提出了基于三维视觉技术的采样实施方法,实现了目标采样点高效选取与采样器位姿快速精调。该技术方法显著提升了嫦娥六号采样过程的整体效率,为人类首次月背采样任务提供了有力支持。
该研究成果以“Vision-based sampling implementation in the Chang’e-6 lunar farside sample return mission”为题发表在Light: Advanced Manufacturing。北京航空航天大学硕士研究生陈从嘉与中国空间技术研究院贾晓宇工程师为共同第一作者,北京航空航天大学屈玉福教授与中国空间技术研究院邓湘金研究员为共同通讯作者,中国空间技术研究院张高研究员和郑燕红高工为共同作者。
研究挑战
为了在有限的时间内完成预期采样任务,高效且可靠地确定目标采样地点并精确实施铲取,是本论文研究的核心关键。为防止采样器在移动和采样过程中发生碰撞,采样点位置需远离大石块和凹坑等风险区域。此外,崎岖的地形会干扰对铲取采样量的控制,加大采样难度。因此,如何对上述因素进行综合且有效的分析考量,并快速确定合适的目标采样点,是研究的一大挑战。
在铲取实施过程中,由于机械臂柔性变形等因素,其牵引采样器抵达目标位置时会出现误差,使得采样器难以按预期姿态与距地高度完成采样,存在空铲、卡铲的风险。为此,在机械臂牵引过程之后,需对采样器位姿进行精确调整,保证采样器准确且安全地铲取月壤样品。这一步骤需要考虑的因素较多,且信息获取受限,往往依赖于人工经验判断与决策。在月地交互的高延时下,存在人员操作需求的精调步骤具有很大的时间成本,是有待解决的难点所在。
目标采样点选取
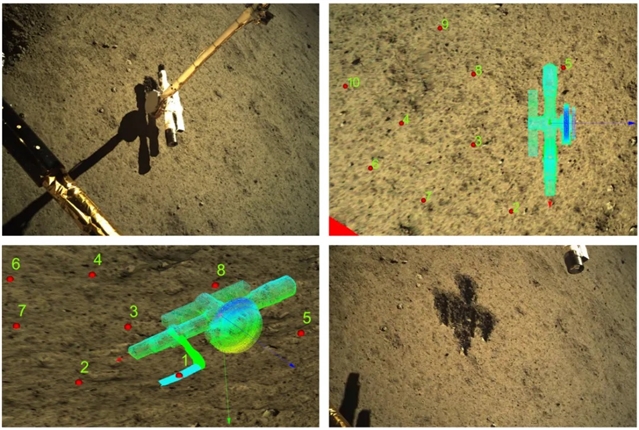
研究团队采用以双目相机、机械臂与采样器为主体的采样实施系统,首先通过三维重建技术利用拍得双目图像得到月表高精度三维点云。针对如图1所示的月表采样任务四种典型地貌,研究团队利用三维点云所包含的三维空间信息,计算采样区域的坡度分布与障碍物分布,并确定采样点选取的有效区域,如图2所示。通过包含邻域坡度、边界距离、障碍物距离与滚转方向坡度多个因素在内的损失函数设计,以及有效区域约束与最小间距约束的加入,实现最优目标采样点的高效自动选取。

图1:四种月表典型地貌
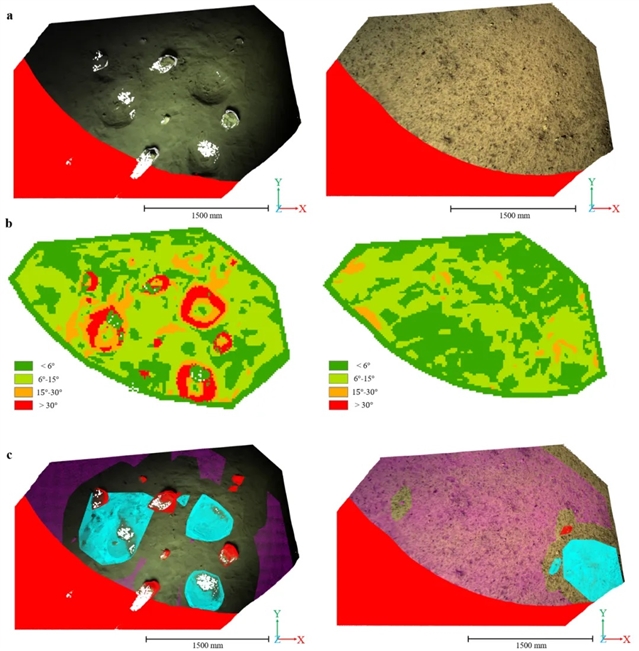
图2:(a)试验场(左)与月表(右)的重建三维点云,(b)采样区域地形坡度分布示意图,(c)采样区域障碍物分布示意图
采样器位姿精调
为实现月表采样实施过程中的采样器位姿精调,研究团队采用6D位姿估计方法,通过点云配准确定采样器点云与模板点云间的相对位姿关系,以鲁棒且准确地快速测定出采样器当前位姿。为了保证精调的可靠性与准确性,研究团队分析了精调过程的主要误差源,并针对性设计了采样器移动与信息采集流程以及误差补偿函数,如图3所示。利用采样器当前位姿信息、采样位置地形地貌信息与触月先验信息,研究团队提出了两种精调方案,以不同的信息利用方式确定精调量,从而充分应对常规情况与特殊情况下的采样器位姿精调。本文设计的方法实现了位姿精调步骤的自动化,省去了对人工分析精调量的依赖,可通过输入图像直接测定采样器位姿并计算给出准确的精调量,大大减少了单次采样耗时。(来源:先进制造微信公众号)
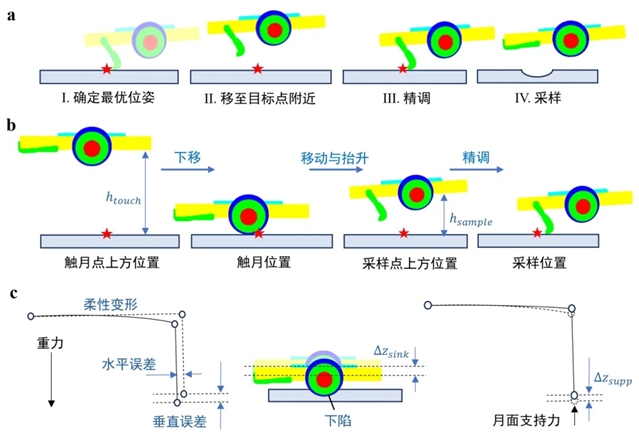
图3:(a)精调总体流程示意图,(b)精调过程移动步骤示意图,(c)精调主要误差示意图
相关论文信息:https://doi.org/10.37188/lam.2025.010
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






