|
|
|
|
|
FME“同心协臂”——液压重载双臂应急救援机器人柔顺运动控制 |
|
|
论文标题:Compliance motion control of the hydraulic dual-arm manipulator with adaptive mass estimation of unknown object
期刊:Frontiers of Engineering Management
作者:Bolin SUN, Min CHENG, Ruqi DING, Bing XU
发表时间:10 Jan 2024
DOI:10.1007/s11465-023-0773-z
微信链接:点击此处阅读微信文章
具备未知物体质量自适应估计的液压双臂柔顺运动控制
Compliance motion control of the hydraulic dual-arm manipulator with adaptive
mass estimation of unknown object
作者列表
Bolin SUN(孙博林)
Min CHENG(程敏)
Ruqi DING(丁孺琦)
Bing XU(徐兵)
关键词
unknown object
未知物体
compliance motion control (CMC)
柔顺运动控制
adaptive mass estimation
质量自适应估计
hydraulic dual-arm manipulator (HDM)
液压双臂
nonlinear control
非线性控制
原文链接
https://journal.hep.com.cn/fme/EN/10.1007/s11465-023-0773-z
点击查看文章详情
01 文章亮点
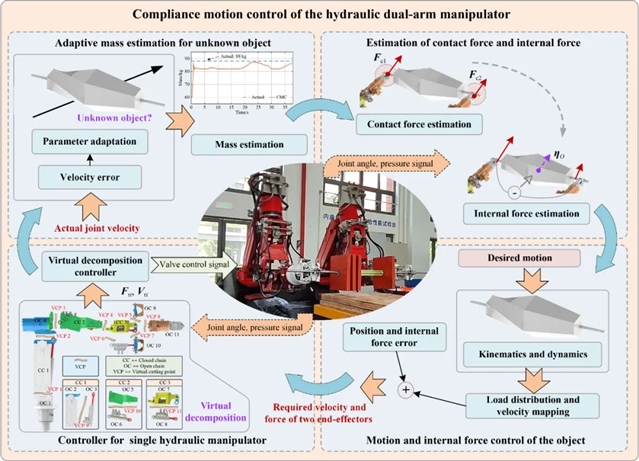
1) 针对液压双臂协作搬运,提出了一种根据目标的速度误差(需求与实际速度之差)来自适应方法估计未知物体的质量的方法。此外,设计了一种根据液压系统压力信号估计物体内力的方法,不需要末端力传感器即可获得物体的内力。
2) 设计了双臂协作的物体运动和内力控制器以控制物体的运动和内力。
3) 基于提出的控制框架,首次完成了多自由度液压双臂的柔顺运动控制实验。实验表明,该控制器能有效提高物体运动跟踪精度以及减小内力。
02 文章简介
与电驱双臂相比,由于未知重载、接触力难以测量、控制复杂等原因,液压双臂闭链操作同一物体的任务更难准确跟踪期望的运动轨迹,可能导致物体变形甚至断裂。
针对上述问题,本文提出了一种液压双臂的柔顺运动控制方法。首先,利用基于速度误差的自适应方法获得未知物体的质量参数。由于物体的实际内力难以获得,压力信号用于估计两个液压机械臂末端执行器的接触力,进而,估计的接触力用于计算物体上的实际内力。最后,通过对物体的位置与内力误差的反馈以调节液压双臂的末端速度,进而减小物体的位置和内力误差,达到液压双臂的柔顺运动效果。此外,基于虚拟分解控制方法对两个液压机械臂设计了位置控制器,进而实现精确的末端运动控制。
通过液压双臂试验台夹持对称和非对称物体分别做直线和圆形轨迹的四组对比实验运动,验证了该方法的有效性。结果表明,该方法能够提高了物体位置精度,减小内力通过液压双臂夹持对称和非对称物体分别做直线和圆形轨迹的四组对比实验运动,其中,在x和z坐标方向上,物体的平均位置误差分别降低了45%、60%、43%、55%和64%、57%、83%、79%,平均内力误差分别降低了80%、76%、73%、70%和71%、77%、87%、89%。此外,该方法能够准确地估计未知物体的质量参数。
文章作者简介

程敏
重庆大学 教授、博士生导师
主要从事高能效液压系统设计与能量管理、高性能重载运动控制与人机交互等方面的研究工作。
中国机械工程学会流体传动与控制分会液压专业委员与青年工作委员;国际期刊Journal of Advanced Manufacturing Science and Technology青年编委会副主任;行业期刊 International Journal of Hydromechatronics、《液压与气动》青年编委;AIM、ICFP、ICFPMCE等多个国际学术会议分会场主席;国家自然科学基金通讯评审专家;教育部学位中心学位论文评审人;国家级企业中心特聘专家;TIE、TMECH、MMT、RAS、AIC等国内外知名期刊通讯审稿人。
承担项目:主持国家自然科学基金优秀青年科学基金、国家自然科学基金面上 / 青年 / 重点支持项目子课题、国家重点研发计划课题 / 子课题、工信部战略新产品等国家级项目以及重庆市技术创新与应用示范专项社会民生类重点研发项目、重庆市自然科学基金面上项目、重庆市基础与前沿研究计划等省部级项目。
发表论著及知识产权:在IEEE Transactions on Industrial Electronics、IEEE / ASME Transactions on Mechatronics、Automation in Construction、IEEE Transactions on Instrumentation and Measurement、IEEE Transactions on Vehicular Technology 等发表SCI论文40余篇,EI论文10余篇,其中多篇入选ESI高被引论文、SCI期刊封面论文、期刊重点推荐论文、中国机械工程学会优秀论文、流体动力国际会议最佳论文、全国流体传动与控制学术会议最佳论文等;获国家授权发明专利10项。
科研奖励:获浙江省科技进步一等奖、中国机械工业科学技术奖一等奖等荣誉。

丁孺琦
华东交通大学 教授、博士生导师
主要从事电液控制元件与系统、重载液压机械臂运动控制等方面的研究工作。
入选江西省“双千计划”科技创新高端人才、江西省杰出青年人才资助计划;兼任中国机械工程学会流体传动与控制分会青年工作委员,《工程设计学报》、《华东交通大学学报》青年编委,ICFP、ICFPMCE等国际学术会议分会场主席,国家级企业中心特聘专家等。
承担项目:主持国家重点研发计划课题 / 子课题、国家自然科学基金面上 / 青年 / 联合基金重点项目子课题等国家级项目,以及江西省杰出青年基金、江西省自然科学基金、中国博士后科学基金面上项目、江西省教改课题等省部级项目。
发表论著及知识产权:以第一或通讯作者在IEEE Transactions on Industrial Electronics、IEEE-ASME Transactions on Mechatronics、Automation in Construction、Mechanical System and Signal Processing、《机械工程学报》等期刊发表SCI论文22余篇、EI论文10篇,其中中国科学院一区 / TOP期刊论文12篇、ESI高被引论文1篇,出版Springer英文专著1部;以第一发明人授权发明专利10项(含1项为美国发明专利)。
科研奖励:获浙江省科技进步一等奖(排3)、江西省技术发明奖一等奖(排3)、中国机械工业科学技术奖一等奖(排8)、江苏省科技进步奖三等奖(排3)等荣誉。指导学生获省级“互联网+”、“挑战杯”竞赛金奖 / 一等奖。
《前沿》系列英文学术期刊
由教育部主管、高等教育出版社主办的《前沿》(Frontiers)系列英文学术期刊,于2006年正式创刊,以网络版和印刷版向全球发行。系列期刊包括基础科学、生命科学、工程技术和人文社会科学四个主题,是我国覆盖学科最广泛的英文学术期刊群,其中13种被SCI收录,其他也被A&HCI、Ei、MEDLINE或相应学科国际权威检索系统收录,具有一定的国际学术影响力。系列期刊采用在线优先出版方式,保证文章以最快速度发表。
中国学术前沿期刊网
http://journal.hep.com.cn

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。