|
|
|
|
|
重庆大学与阿尔伯塔大学联合研发:基于全对称型TRMPC的自动驾驶车辆安全运动规划控制框架 Engineering |
|
|
论文标题: Safe Motion Planning and Control Framework for Automated Vehicles with Zonotopic TRMPC
期刊:Engineering
作者:Hao Zheng, Yinong Li, Ling Zheng, Ehsan Hashemi
发表时间: February 2024
DOI:https://doi.org/10.1016/j.eng.2023.12.003
微信链接:点击此处阅读微信文章
1、文章导读
自动驾驶车辆在增强安全性、降低能源消耗和优化交通流等方面存在巨大潜力,已成为智能交通系统发展的核心环节之一。随着智能驾驶中先进功能的不断增加,其运行阶段的安全至关重要,主要聚焦于三个典型安全问题:功能安全(ISO 26262)、预期功能安全(ISO 21448)及网络安全(ISO 21434)。其中,预期功能安全既是当前学术研究热点,也是高阶自动驾驶应用面临的直接挑战。预期功能安全旨在处理潜在危险行为,包括与规格、性能和态势感知相关的不足或限制,合理可预见的误用,以及环境影响(其他用户、无源基础设施、天气及电磁干扰等)。当前自动驾驶的运动规划和控制技术也存在属于预期功能安全范围的问题。例如,控制层内的模型失配等不确定性将不可避免地导致未来时域内的跟踪误差,而规划层并未考虑该控制误差在规划周期内的影响。
有鉴于此,重庆大学智能汽车团队郑浩、李以农、郑玲与阿尔伯塔大学Ehsan Hashemi在Engineering期刊联合发表了题为“Safe Motion Planning and Control Framework for Automated Vehicles with Zonotopic TRMPC”的研究,采用集合论、管基鲁棒理论与可达性分析等方法,提出了一种保证安全的运动规划控制框架,以增强多维不确定性下的自动驾驶预期功能安全。
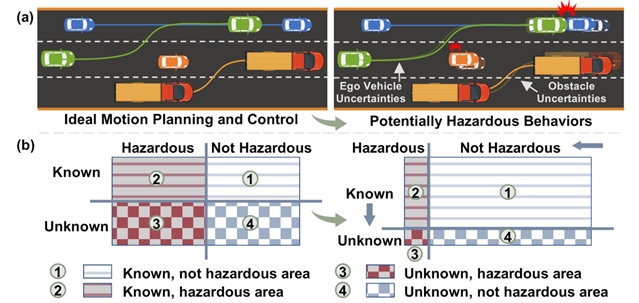
图1.(a)潜在危险行为示意(b)预期功能安全目标
2、研究内容
为实现上述保证安全的运动规划控制框架,作者在自动驾驶控制层方面,利用集合论对控制环节内可能不确定性进行高效的可达性分析,并基于此开发了一种灵活高效的全对称型管基鲁棒模型预测控制器(TRMPC)。该控制器可将所有可能不确定性的未来演化收敛至一最小鲁棒正不变集中,同时也保证一定时域内的控制误差传播束紧在一有界紧闭集内。作者在规划层方面,通过考虑来自控制层误差的有界紧闭集对规划层的影响,提出了安全集的概念以描述自车/障碍物的可达几何边界。安全集作为规划层基础概念,用于后续轨迹评估筛选。综上,控制层全对称型TRMPC及规划层安全集的深度嵌合,保证自动驾驶车辆的真实轨迹始终被约束在安全管内,以增强预期功能安全。
3、研究总结
作者在硬件在环实验中提供两类典型场景的测试案例,①操控极限工况下的主动变道场景和②常规工况下的避撞场景,均验证了所提出安全运动规划控制框架的安全性、有效性和实时性,证明了该框架可以减少自动驾驶预期功能安全场景类别中可能存在的危险/未知区域。作者鼓励的进一步研究方向包括:①利用现代线性化方法建模车辆系统,进一步缩小扰动集,以降低该框架保守性。② 在该框架中嵌入最先进的运动规划方法,以进一步增强自动驾驶能力。
作者介绍

郑浩,重庆大学机械与运载学院博士。2021年于阿尔伯塔大学机械工程系作访问博士。目前研究领域包括自动驾驶车辆的安全运动规划和控制,致力于鲁棒控制理论、集合论、可达性分析及安全强化学习等。

李以农,重庆大学高端装备机械传动全国重点实验室二级教授。曾先后主持和参加完成国家自然科学基金项目、863项目、国家重点研发计划及省部级科技重点攻关项目40余项,获国家科技进步二等奖、省部级科技进步一二等奖等。目前研究领域包括智能车辆运动控制与底盘域控技术。
引用信息:Hao Zheng, Yinong Li, Ling Zheng, Ehsan Hashemi, Safe Motion Planning and Control Framework for Automated Vehicles with Zonotopic TRMPC, Engineering 2024.

开放获取全文
https://doi.org/10.1016/j.eng.2023.12.003
推荐阅读
Engineering 2024年3月刊目录 | 人工智能专题
主编报告:推进人工智能赋能新型工业化
本刊主编:人工智能的未来
自动驾驶汽车的新兴安全挑战:预期功能安全
浙江大学研究团队:二氧化碳捕集、利用与封存技术
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






