随着无人飞行器技术的快速发展,集群系统在灾害救援、物流配送、农业植保等领域的应用潜力日益凸显。集群自主控制是无人飞行器集群方向的核心关键技术和“卡脖子”挑战痛点难题,通过突破无人飞行器集群自主控制技术,实现高效协同作业,提升复杂环境下的任务适应性和系统鲁棒性,为未来智能无人飞行器的新质规模化应用提供关键技术支撑。
《自动化学报》无人飞行器集群自主控制专题包括6篇文章,涉及无人飞行器编队控制、集群围捕、任务分配、集群相变等方面的研究,凸显国内专家学者在无人飞行器集群自主控制方向的部分新理论、新方法和新技术,反映我国研究人员在无人飞行器集群自主控制方面的最新研究成果,推动相关领域的创新发展。
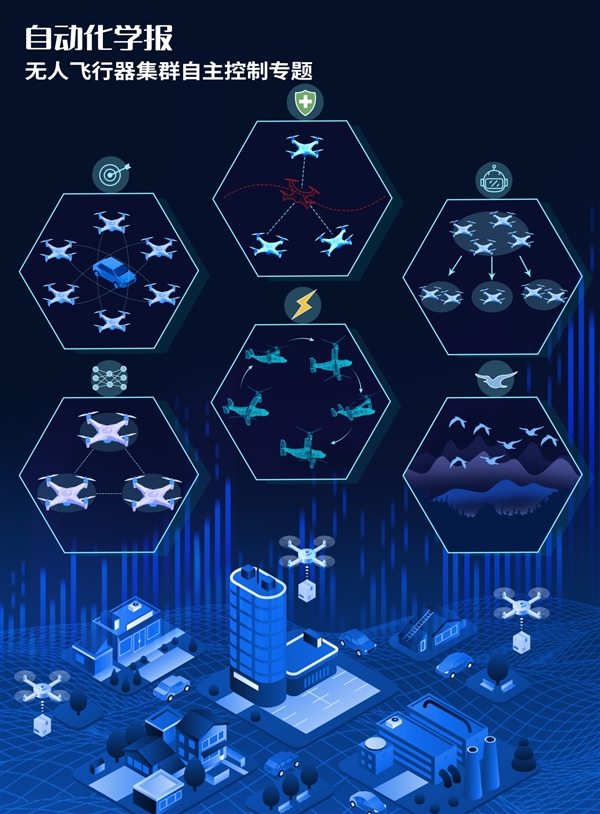
1)性能函数引导的无人机集群深度强化学习控制方法
湖南大学王耀南院士和南开大学方勇纯教授合作提出一种针对无人机集群系统的性能函数引导深度强化学习控制方法,同时评估性能函数的示范经验与学习策略的探索动作,以保证高效可靠的策略更新,实现无人机集群系统的高性能控制。实验验证所提方法可显著提升无人机集群的控制精度,实现兼顾鲁棒性与飞行精度的高性能集群控制。
2)基于覆盖理论的高速强机动目标集群协同围捕
中国长峰机电技术研究设计院江涌院士团队提出一种三维空间内基于非线性动态模型的高速强机动目标覆盖策略,研究一种基于三维圆锥体可达域的碰撞平面等效覆盖方法,并设计一种新型协同制导律,以实现对目标加速度的覆盖。提出一种分段覆盖动态调节与快速收敛策略,可使多飞行器在前期保持高覆盖率,后期降低整体的脱靶量,从而体现围捕覆盖的优势。
3)无人飞行器集群自主控制:预设性能驱动的安全编队控制
北京理工大学陈杰院士团队针对障碍环境下多无人机编队跟踪问题,提出一种兼顾编队跟踪性能与安全的控制框架。利用性能边界可调的预设性能控制方法生成期望控制信号,基于控制障碍函数描述无人机的安全状态集合,研究了二次规划问题,构造了辅助系统以实现性能函数的自适应更新,所提方法可在编队跟踪与安全性冲突条件下确保系统安全,在不发生冲突时实现性能约束下的编队跟踪。
4)无人飞行器集群自主控制:基于联盟形成博弈的任务分配
南京航空航天大学姜斌教授团队针对复杂多约束条件下异构无人机集群系统的任务分配问题,提出一种基于联盟形成博弈的分布式任务预分配和重分配方法。设计一种无故障条件下的分布式任务预分配方法,以降低任务分配求解的复杂度,同时可提高最终解的平均质量,并针对无人机故障问题,准确分析健康无人机的运动模型,合理划分重分配范围,设计基于任务预分配结果的无人机集群系统重分配算法。
5)仿鸟群自推进机制的无人机集群相变控制
北京航空航天大学段海滨教授和中国航空工业集团公司沈阳飞机设计研究所李明院士合作提出一种仿鸟群自推进粒子模型的无人机集群相变控制方法。通过设计速度保持项和势能梯度项构建仿鸟群运动模型,并设计相变控制项模拟巢穴对鸟群的吸引,以实现集群在不同相态之间的转换。仿真验证了集群存在的两种稳定运动构型,所提出的相变控制律可实现两种典型集群运动相态的互相转换。
6)基于固定时间模型参考方法的倾转旋翼无人机姿态控制
清华大学朱纪洪教授团队针对倾转旋翼无人机姿态控制问题,建立一种扰动观测器结合终端滑模补偿控制器的模型参考控制方法。设计一种固定时间收敛扰动观测器,并结合固定时间收敛终端滑模控制器和低通滤波实现对指令的快速高品质跟踪,提出一种在纵轴附近邻域时的控制器改进策略。相比有限时间稳定性理论的模型参考姿态控制方法,固定时间收敛控制具有更高的控制精度和更平滑的输出。
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






