?
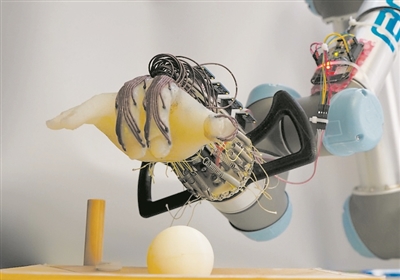
研究人员设计的低成本、高能效的机械手,只凭手腕运动和“皮肤”感觉,就可抓住一系列物体而不会让它们掉落。图片来源:剑桥大学
科技日报讯 (记者张梦然)抓取不同大小、形状和纹理的物体对人类来说很容易,但对机器人来说却很有挑战性。英国剑桥大学团队设计了一种低成本、高能效的柔性3D打印机器人手,它凭手腕运动和“皮肤”感觉运作,不仅能抓住一系列物体,而且不会让它们掉落。研究结果发表在最近的《先进智能系统》杂志上。
该机械手经过训练可抓取不同物体,并能利用放置在其“皮肤”上的传感器提供的信息来预测这些物体是否会掉落。这种被动运动使机器人比全电动手指机器人更容易控制,也更节能。
研究人员表示,他们的适应性设计可用于开发低成本机器人,这些机器人能够进行更自然的运动,并且可学习抓取各种物体。
人手非常复杂,在机器人中重现其所有的灵活性和适应性是一项巨大的研究挑战。
剑桥大学工程系仿生机器人实验室研究人员试图开发解决这两个问题的潜在方法:机器人手可用最少的能量以恰当的力量抓取各种物体。
研究人员使用植入了触觉传感器的3D打印拟人化手,这样手就能感觉到它正在触摸什么。这只手只能进行被动的、基于手腕的运动。团队对机器人手进行了1200多次测试,观察其抓住小物体而不掉落的能力。该机器人最初使用小型3D打印塑料球进行训练,并使用通过人类演示获得的预定义动作来抓住它们。
机器人通过反复试验来了解什么样的抓握会成功。在用球完成训练后,它会尝试抓取不同的物体,包括桃子、电脑鼠标和一卷泡沫包装纸。在这些测试中,机械手成功抓住14个物体中的11个。
将来,该系统可通过多种方式进行扩展,例如通过添加计算机视觉功能,或者教机器人利用其环境,这将使它能够抓取更广泛的物体。
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。