荣获2014年诺贝尔化学奖的被称为纳米光学显微系统的发明是一种极为先进的纳米光学显微形态,其可以超越传统的远场衍射极限,并具有低至几纳米的光学分辨率。结合此项技术突破,例如由非线性光聚合反应所实现的基于光学的3D打印技术成为了一个新兴的迅速发展的领域。目前,3D激光打印纳米结构可实现小至几十纳米的立体像素分辨率。结合第三项关键的科学成果 - 即聚集光线以捕获,俘获以及操纵微型物体的神奇能力 - 我们就能够获得真正的光驱动微机器人所需要的三大新功能。结合所有这些光学和光子学方面的惊人成果,我们可以利用大部分功能创造一些条件,开发出一个令人感兴趣的真正的所谓光学机器人的概念。
预见在不久的将来,可以用多功能生物光子学纳米探针或具有真正纳米级分辨率的纳米尖端来装备3D激光打印机器人。这种方法的独特性是,即使一个微生物学家旨在探索例如纳米级的细胞生物学,每种激光机器人结构的主要支持手段是通过3D打印得到一个尺寸和形状,以实现便利的全3D激光操作 – 甚至会使用相对适中的数值孔径光学元件。光学机器人一般都配备有许多3D打印跟踪球,可以实现六种自由度的实时3D激光操控。这可以实现一种类似无人机的功能,这种功能使每一个光驱动机器人能够通过操纵杆控制,并且让使用者有种伸展手臂就可以接触到生物微环境,并与微生物环境相互作用的感觉。光驱动机器人可以作为自由浮动探针对微生物过程进行监测,并且提供空间目标的机械,化学甚至光刺激,否则这些刺激将不可能在全3D生物环境中起作用。可以组合光学操控、加工和光热作用以生成下一代具有颠覆性功能的光俘获微型结构。通过我们近期在LSA的工作,我们制造出了通过光热技术生成水动力电流的具有货物装载和卸载能力的光学机器人。这种光学机器人模仿一种加载和卸载货物的微型注射器的功能。该功能可能会对亚细胞尺度的目标药物输送带来很大的影响。
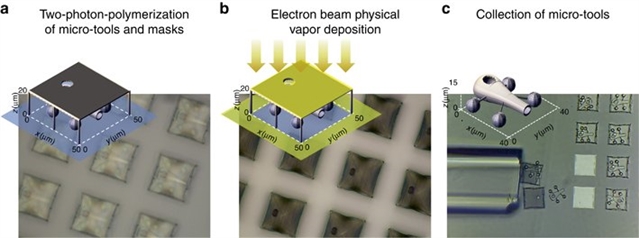
为了使微型机器人能够在内部产生水动力电流,我们利用气相沉积在其空心体内嵌入一薄金属层。微型机器人是通过对向射束阱控制的,可以置于3D中。一个附加的射束阱已被重新设计为金属层加热光束。通过激光束照射,会产生极大的热能,从而形成一种对流电流。生成的水动力电流足够承载二氧化硅和聚苯乙烯球珠。微观环境下的间接相互作用规避了传统的光学捕获中的折射率对比度要求,并且能够防止光敏损伤 - 感光试样。光学捕获的并行和独立控制系统可以用来控制多种光驱动微型机器人。每个微型机器人都可能具有不同的设计和功能,这些设计和功能可能会使其能够在受到相关化学或物理刺激时,在一定空间和时间内进行相关操作。我们相信这种方法能够为亚细胞水平的细胞动力学提供进一步的细节。
相关的研究成果发在《Light: Science & Applications》杂志上(Light: Science & Applications (2016) 5, e16148; doi:10.1038/lsa.2016.148)。相关的全文链接请参看:http://www.nature.com/lsa/journal/v5/n9/full/lsa2016148a.html。(来源:科学网)






