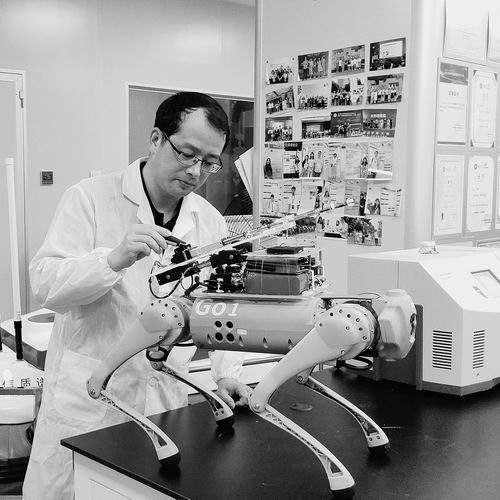
仿生四足机器人。刘旋/摄
本报讯(记者朱汉斌)近日,暨南大学环境与气候学院副研究员胡斌及其合作团队开发出一种仿生四足机器人质谱分析系统(Robot-MS)。研究人员通过远程遥控机器人进入危化环境并控制机械臂采样阵列,实现对多个目标区域的痕量有毒有害挥发性有机化合物的快速采集,再通过便携式气相色谱质谱现场快速分离分析,实现快速定性定量测定复杂环境中的危化污染物。相关研究成果发表于《分析化学》。
要想及时掌握环境污染重大重点风险源的状况及分布情况,现场采样与精准分析至关重要。然而,现有的分析装置在面对现场复杂的环境时,其分析检测能力、安全性、便携性和通用性都面临挑战。
该研究系统考察了Robot-MS系统的分析性能、环境适用性和现场分析能力,验证了在楼梯、不规则地面、草地、狭小空间等场景下的机器人采样,并展示了在人员不宜进入的化学品泄漏、烟雾、燃烧场景中,以及模拟化学战剂等有毒有害和易燃易爆危化环境下,机器人的采样与质谱分析能力。
记者获悉,美国化学会新闻周刊对该研究进行了报道,并引述了胡斌团队在无人机质谱与无人船质谱方面的研究进展。这些工作是该团队在智能机器人质谱研究系列中的阶段性进展。该系列工作旨在开发新型智能机器人质谱分析系统,在智能、安全、便捷、精准等多个维度上发展新的方法学,解决常规方法不能进入化学危害、生物危害、放射性等极端环境分析的难题,全面提升现场监测能力。
相关论文信息:
https://doi.org/10.1021/acs.analchem.4c01555
《中国科学报》 (2024-06-19 第3版 领域)






