|
|
|
重庆大学、上海大学等 |
|
研制出可快速持续跳跃的无腿软体机器人 |
|
|
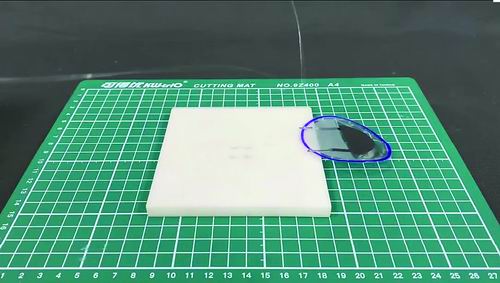
软体机器人跨越障碍物的跳跃实验。 重庆大学供图
本报讯(记者冯丽妃)重庆大学教授陈锐、上海大学教授蒲华燕等研制出一款无腿软体机器人,可进行快速、持续的可控跳跃。该发现提供了一种新方法,可在绳系模型机器人中产生敏捷的多模态运动。相关研究近日发表于《自然—通讯》。
一些机器人需要靠跳跃来拓展其导航范围、越过障碍以及适应非结构化的环境。要做到增加软体机器人的跳跃高度和距离,以改进其越障能力,同时保持对跳跃频率的控制以增进机动性和导航,目前仍是一个难题。
陈锐、蒲华燕和合作者开发了一个1克重、6.5厘米长的机器人,这种机器人具有能朝前跳跃的内部结构,由灵活的、电力驱动的液体再分配来提供动力。他们的研究表明该机器人能跳到自身身高7.68倍的高度,每秒能持续向前跳跃达体长6倍的距离。
研究还展示了该机器人能越过包括陡坡、电线、堆积的砾石和不同形状立方体等障碍。通过联结两种制动器(使机器人运动的组件),这个机器人能够以138.4度/秒的速度可控旋转。
陈锐等建议进行结构优化以改进软体机器人的跳跃性能,未来对无绳方案的进一步研究或可增进这类软体机器人的通用性。
相关论文信息:https://doi.org/10.1038/s41467-021-27265-w
《中国科学报》 (2021-12-14 第4版 综合)






