|
|
|
|
|
Biomimetics:如何让机器人在水中来去自如?答案藏在鲨鱼皮中 |
|
|
论文标题:Quantifying the Leaping Motion Using a Self-Propelled Bionic Robotic Dolphin Platform
论文链接:https://www.mdpi.com/2313-7673/8/1/21
期刊名:Biomimetics
期刊主页:https://www.mdpi.com/journal/biomimetics
最近,一项发表于 Biomimetics 的研究,从鲨鱼皮肤中获取灵感,研制出了一款具有具有多孔基底和仿生鲨鱼小齿结构的3D打印游泳机器人,实现了可控的马兰戈尼推进,为未来自主游泳机器人的仿生结构设计打开了新思路。
灵感来源:鲨鱼皮肤的秘密
鲨鱼,作为海洋中的高效游泳者,其皮肤结构一直备受科学家关注。研究发现,鲨鱼皮肤表面覆盖着数百万个微小的“鳞齿”,这些鳞齿不仅具有减阻功能,还能在游动中主动调节水流、防止逆流。更令人惊讶的是,鲨鱼皮肤表面还会分泌黏液,虽然量少,但其表面张力极低 (约20–30 mN/m),这种粘液的低表面张力可以诱导马兰戈尼推进,促进主动减阻。当与小齿微观结构的流体动力学特性相结合时,这种机制可能会产生意想不到的性能增强,而目前对涉及粘液的主动机制的关注很少,因此需要进一步研究这种仿生主动减阻方法。
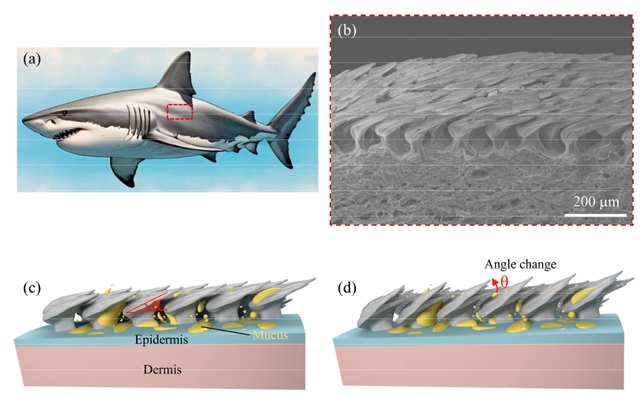
图1:鲨鱼齿状突起的特征及推进设计概念。(a) 短鳍真鲨 (Isurus oxyrinchus) 的示意图 (b) 鲨鱼齿状突起的横截面扫描电子显微镜 (SEM) 图像 (c) 鲨鱼皮肤的层级结构示意图 (d) 攻角θ随流动条件变化而变化
机器人设计:3D打印+仿生结构
为了验证这一猜想,研究团队采用高精度3D打印技术,制造出一种多层结构的游泳机器人:
•底层:多孔基底,用于储存和释放表面活性剂 (如HFIP、乙醇等);
•上层:仿鲨鱼鳞齿阵列,排列方式模拟真实鲨鱼皮肤的“交错重叠”或“线性排列”;
•侧边:加装超疏水围栏,显著降低水阻,提升推进效率。
研究人员还通过微CT扫描真实鲨鱼皮肤,重建了单颗鳞齿的3D模型,并将其放大10倍进行打印,以确保结构细节的精确复现。
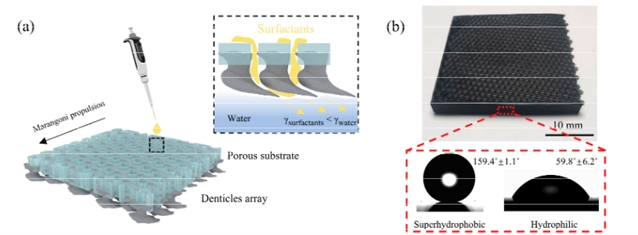
图2:(a) 自推进式马兰戈尼驱动游泳器 (b) 3D打印的自推进式马兰戈尼游泳器照片,其具有交错重叠的齿状阵列,并在游泳器两侧设有超疏水或亲水屏障
机器人的推进方式非常巧妙,当表面活性剂从底部的微孔中释放到水中时,会在机器人后方形成表面张力梯度,从而产生向前推进的马拉戈尼力。更厉害的是,通过调控鳞齿排列方式和表面活性剂的注入位置,机器人可以实现直线前进、顺时针或逆时针旋转等多种运动轨迹。详情如下:
•注入中央列孔 → 直线前进;
•注入左侧列孔 → 顺时针旋转;
•注入右侧列孔 → 逆时针旋转。
这种“按需推进、轨迹可控”的特性,让这款机器人在未来应用中极具潜力。
研究比较了两种鲨鱼 (短鳍鲭鲨与太平洋铲吻鲨) 的鳞齿结构对推进性能的影响。结果发现,短鳍灰鲭鲨的鳞齿排列更密、孔隙率更高,因此在气动推进中表现更优。而太平洋大吻斜齿鲨的鳞齿表面具有六边形凹坑结构,虽在气动中无显著优势,但在水动推进中能有效抑制涡流、增强推进。
研究团队对机器人进行了多项性能测试,得出以下结论:
•超疏水表面能显著提升推进速度与续航时间,最大速度达10.05 cm/s,续航时间比亲水表面长两倍以上;
•鳞齿攻角为30°时,无论在水中还是空气中,推进性能均为最佳;
•表面活性剂表面张力越低,推进效果越好,其中HFIP (表面张力仅14.53 mN/m) 表现最佳。
总结:当鳞片成为“引擎”——一场由表面张力驱动的仿生革命
这项研究提出了一种新型的自主游泳机器人仿生设计,强调了鲨鱼粘液通过马兰戈尼效应在主动减阻中的潜在作用,并为未来探索微纳米级结构对推进性能的影响提供了基础。随着3D打印、超疏水材料、微流控技术的进一步发展,这类“结构-功能一体化”的仿生机器人,必将成为机器人技术领域的重要方向。从鲨鱼皮肤上一片微小的鳞齿,到一台能在水面上自主导航的机器人——这项研究向我们证明:自然中仍藏着无数未被书写的推进原理与运动智慧,等待我们以更谦逊也更敏锐的方式去发现、解读与再造。
英文原文:
Yang, K.; Wang, C.; Jiang, L.; Fang, R.; Dong, Z. Bioinspired Swimming Robots with 3D Biomimetic Shark Denticle Structures for Controlled Marangoni Propulsion. Biomimetics 2025, 10, 479.
Biomimetics期刊介绍
主编:Stanislav N. Gorb, Kiel University, Germany
期刊致力于研究生物体的最基本方面及其特性向人类应用的转移。期刊旨在为材料科学、机械工程、纳米技术和生物医学领域的研究人员和专业人士提供一个平台,通过在工程系统、技术和生物医学中利用生物启发的设计,开发实现可持续创新的解决方案。
|
2024 Impact Factor
|
3.9
|
|
2024 CiteScore
|
4.2
|
|
Time to First Decision
|
17 Days
|
|
Acceptance to Publication
|
3.8 Days
|
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






