|
|
|
|
|
FME文章荐读 | 冰壶比赛中新型六足冰壶机器人投掷冰壶的分析与解决方案 |
|
|
论文标题:Analysis and solution for the curling stone throwing of a novel six-legged curling robot in curling competition
期刊: Frontiers of Mechanical Engineering
作者:Yuguang XIAO, Ke YIN, Yue ZHAO, Zhijun CHEN, Feng GAO
发表时间:15 Jun 2025
DOI:10.1007/s11465-025-0835-5
微信链接:点击此处阅读微信文章
在冰壶比赛中,投掷策略对比赛结果有着决定性的影响。机器人应用于冰壶运动时,首先需要了解冰壶比赛中的各种投掷策略,然后调整运动控制参数,实现相应的策略投掷。然而,目前的冰壶策略研究缺乏针对机器人投掷策略的数学分析和描述方法。此外,也缺乏对机器人如何实现相应投掷策略的研究。这些局限性限制了冰壶机器人在冰壶运动中的应用和发展。
《Frontiers of Mechanical Engineering》2025年第20卷第3期的一篇题为“Analysis and solution for the curling stone throwing of a novel six-legged curling robot in curling competition”的研究论文,提出冰壶石的击打域和击打树概念,通过构建击打域和击打树来分析和描述机器人的冰壶投掷策略,并基于此开发机器人控制参数的搜索求解方法,还将研究成果集成到冰壶机器人辅助决策软件中,该软件帮助机器人在与人类的比赛中获胜,研究成果对冰壶机器人和腿式机器人的应用与发展具有重要意义。
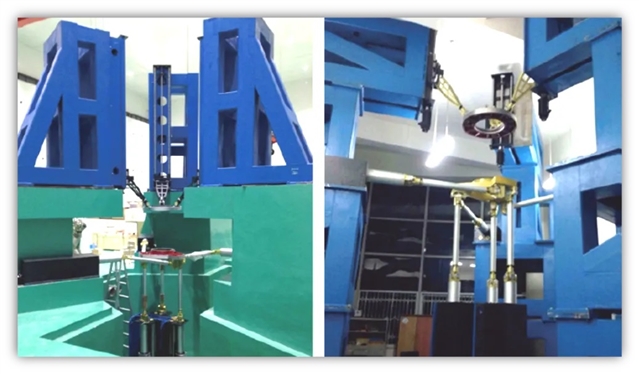
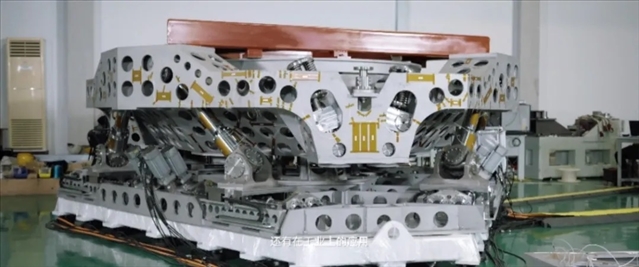
六足冰壶机器人具有六足行走、四足调整和双足投掷三种构态。六足行走时采用3-3步态,四足调整时可根据投掷目标角度调整位置和角度,双足投掷时通过后腿蹬踏加速滑行并配合前手完成推放冰壶。机器人后腿设计有并联机构以提高承载能力,身体下方安装滑板以满足滑行需求,前腿复用为手臂抓取冰壶,通过安装在膝关节和踝关节的驱动轮和被动轮使冰壶旋转,还配备64线激光雷达和摄像头检测冰壶信息。此外,介绍了机器人投掷角度调整和投掷规划,投掷规划分为蹬踏、滑行和推送三个阶段,分别采用七次多项式轨迹曲线等进行规划。
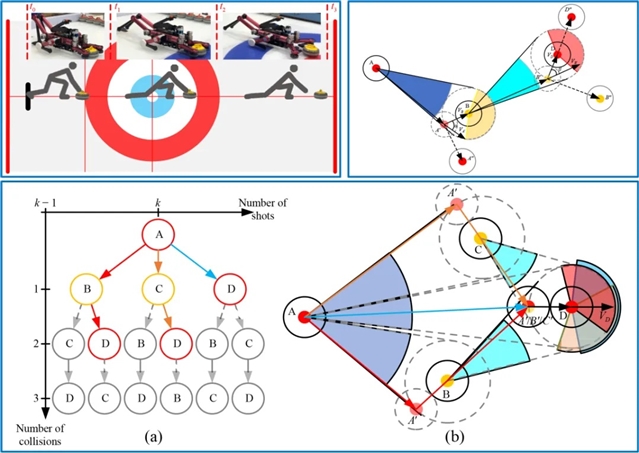
在冰壶比赛中,运动员常通过击打冰壶改变冰壶位置影响比赛。研究引入击打域和击打树概念对潜在碰撞进行数学分析和描述。击打域由碰撞域和速度可能域构成。其中,碰撞域由从冰壶A中心出发、与以冰壶B中心为圆心、两倍冰壶半径为半径的圆相切的两条切线组成,当冰壶A速度方向在碰撞域内时,可根据碰撞模型得到冰壶B的速度可能域。对于冰面上多个冰壶,通过组合、排列和剪枝等操作生成击打树,当某分枝击打域为空时进行剪枝,从而分析和描述潜在的投掷策略,为机器人决策和控制参数求解提供基础。
使六足冰壶机器人参与比赛的关键在于根据击打树和击打域来分析和描述冰壶策略,以及基于这些求解机器人相应的控制参数。首先对投掷策略进行求逆,得到碰撞时冰壶的运动状态,再建立冰壶运动学模型求解机器人释放冰壶时的运动状态,最后根据机器人投掷规划求解控制参数。求逆时忽略碰撞瞬间摩擦,通过匀加速运动等计算碰撞速度等;冰壶运动学模型采用前后摩擦不对称模型,解释了冰壶的“J”形轨迹;控制参数包括投掷角度、蹬踏速度、滑行时间、推送速度和冰壶转速等,通过迭代搜索法求解,将过程集成到辅助决策软件中,根据冰壶位置信息分析击打树和击打域,制定策略,求解控制参数,调整摩擦系数提高投掷精度。
为验证投掷策略分析和控制参数求解方法的有效性,进行了仿真与实验。仿真分析了冰壶机器人与运动员比赛的最后一投,通过求解撞击树和撞击域,决策制定策略,软件计算碰撞位置,结果表明该方法能有效描述策略辅助决策。控制参数求解验证了两种经典策略,计算位置与期望位置误差较小,实际轨迹与计算轨迹一致,验证了模型和方法的正确性。机器人与专业轮椅运动员比赛,虽前两投因摩擦系数计算误差出界,但调整后成功得分获胜,证明辅助决策软件能有效提供控制参数,提高机器人比赛表现。
关键词
冰壶机器人;冰壶策略;腿式机器人;控制参数
引用
Yuguang XIAO(肖宇光), Ke YIN(尹科), Yue ZHAO(赵越), Zhijun CHEN(陈志军), Feng GAO(高峰). Analysis and solution for the curling stone throwing of a novel six-legged curling robot in curling competition. Front. Mech. Eng., 2025, 20(3): 19
https://doi.org/10.1007/s11465-025-0835-5

扫描二维码阅读原文
作者团队介绍
高峰,上海交通大学机械与动力工程学院教授、博士生导师,国家级领军人才,973首席科学家,原机械系统与振动国家重点实验室(上海交通大学)主任,原河北工业大学校长。
高峰教授长期从事并联机器人的研究与应用,创造性地提出了并联机器人型综合GF集理论体系,形成了并联机器人全域定量评价和尺度综合可视化方法,成果成功应用于巨型重载操作装备等产品创新设计,为我国并联机器人型装备自主研发提供设计理论基础。2013年“并联机器人机构拓扑与尺度设计理论”荣获国家自然科学二等奖。
在工程实践方面,高峰教授在十多年间主持过国家973、863、自然基金、重点研发计划等项目,将并联构型理论与国家重大工程装备开发结合,成功发明和开发出国产嫦娥探月、太空望远镜、船舰核动力、大锻件极端制造、冬奥会冰雪运动等相关机器人型装备。2022年获“探月工程嫦娥五号任务先进个人”荣誉称号。
高峰教授团队目前由专职科研教师、博士后、工程技术人员、在读博士硕士生、实验技师等组成。团队为航天部八院研制出9自由度并联结构空间交互对接运动模拟器,为航天部五院研发了行走式外星探测机器人。为长春光机所开发的10吨负载超高精度六自由度微调与定位平台,为上海核工程研究设计院开发10吨载荷大空间海浪摇摆台。在巨型重载锻造操作机、新型伺服压力机、冲压线自动上下料机器人、大型自由锻件在线检测系统、钢包砌筑机器人、无模铸造等方面均有系统解决方案案例,研发的系统已成功应用于生产。
9自由度并联结构空间交互对接运动模拟器
超高精度六自由度微调与定位平台

10吨六自由度摇摆台
目前团队在六足机器人的研发方面在国际上处于领先,其特色在于机构本体创新发明的服务能力,在机器人基础部件研发和人机交互智能化控制方面有较强实力。团队坚持自主开发核心控制算法与核心部件,已经形成机器人核心驱动单元部件,包括:六维力/力矩传感器、扭矩传感器以及一体化柔性集成驱动单元。2022年团队获得“科技冬奥”重点专项“面向冬奥会的六足机器人关键技术研发和典型示范应用”项目以及“冰雪面火炬传递六足机器人开发”项目。开发出冰壶、滑雪、导盲等5款六足机器人,其中冰壶机器人在2022北京冬奥会现场进行的展示,取得了6次击打全面命中的成绩;滑雪六足机器人入选了2022年“奋进新时代主题成就展”,作为北京冬奥科技创新成果的展示。


冰壶六足机器人

滑雪机器人在“奋进新时代主题成就展”
滑雪机器人已被陈列在党史馆

导盲六足机器人
(整机20kg,负载10kg,速度3米/秒,续航2.5小时)
在产业化方面,团队与联想集团签订了“智能足式电力巡检作业机器人联合研发”项目,努力将足式机器人投入到电力巡检等产业化应用中去。未来该团队将继续在机器人本体、核心驱动单元以及机器人核心控制算法等方面继续深入研究,不断提升行走机器人的性能,实现更复杂的救灾作业任务。
联想-上海交大联合开发的六足巡检机器人
(整机60kg,负载80kg,速度1.6米/秒,续航4小时)
精彩推荐
1.FME文章荐读 | 纵向超声振动辅助铣削GH4169D高温合金材料去除机理与表面纹理研究
2.FME文章荐读 | 基于折纸模型的抛物柱面网状天线单层桁架结构设计方法与驱动配置优化
3.FME期刊内容摘要 | 2025年第二期(Apr. 2025, Volume 20 Issue 2)
4.FME文章荐读 | 基于深度学习的空间转动-球面-圆柱-转动机构轨迹综合
5.FME文章荐读 | 用于有限元分析的高效分块对称压缩稀疏列方法
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






