期刊名:Robotics
期刊主页:https://www.mdpi.com/journal/robotics
还在为筛选文献而发愁?本期为您推荐Robotics 2024年12篇期刊月度封面文章,主题涉及手术机器人、人机协作、机器人写作、人机物理交互、无人机等领域,为您提供最受欢迎的研究进展!
1.
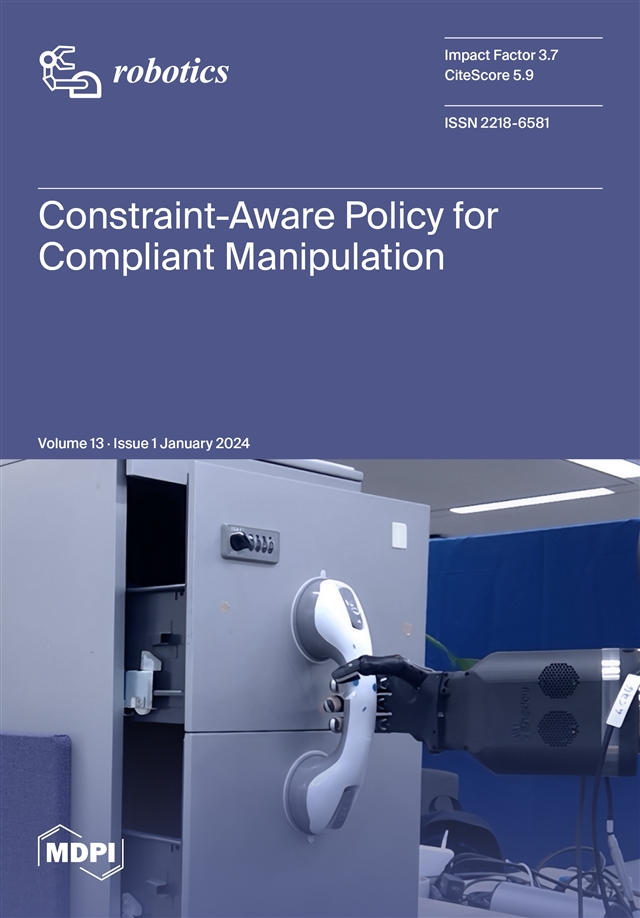
英文标题:Constraint-Aware Policy for Compliant Manipulation
中文标题:兼容操作的约束感知策略
文章链接:https://www.mdpi.com/2218-6581/13/1/8
MDPI引用格式
Saito, D.; Sasabuchi, K.; Wake, N.; Kanehira, A.; Takamatsu, J.; Koike, H.; Ikeuchi, K. Constraint-Aware Policy for Compliant Manipulation. Robotics 2024, 13, 8. https://doi.org/10.3390/robotics13010008
2.
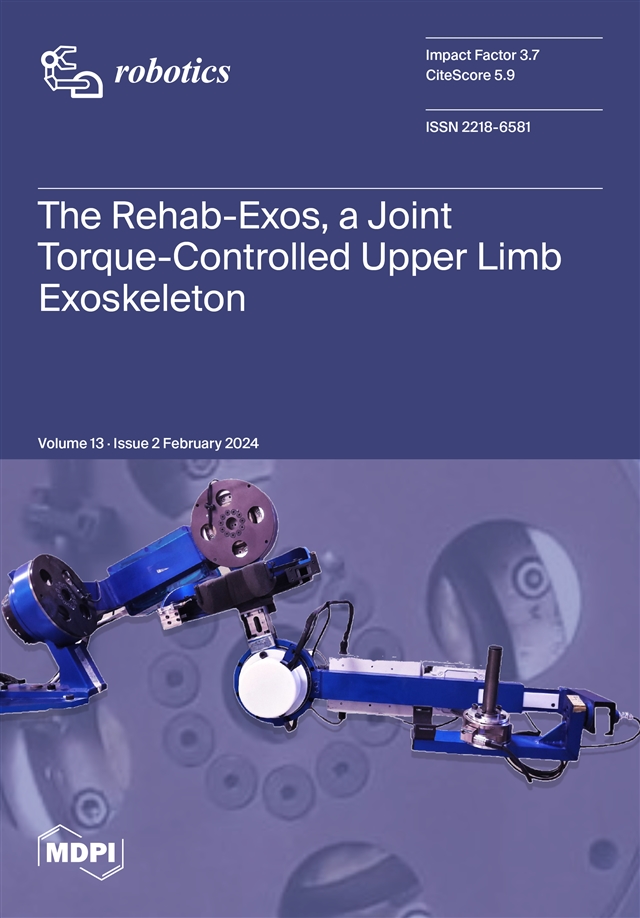
英文标题:Design and Control of the Rehab-Exos, a Joint Torque-Controlled Upper Limb Exoskeleton
中文标题:关节力矩控制上肢外骨骼康复的设计与控制
文章链接:https://www.mdpi.com/2218-6581/13/2/32
MDPI引用格式
Chiaradia, D.; Rinaldi, G.; Solazzi, M.; Vertechy, R.; Frisoli, A. Design and Control of the Rehab-Exos, a Joint Torque-Controlled Upper Limb Exoskeleton. Robotics 2024, 13, 32. https://doi.org/10.3390/robotics13020032
3.
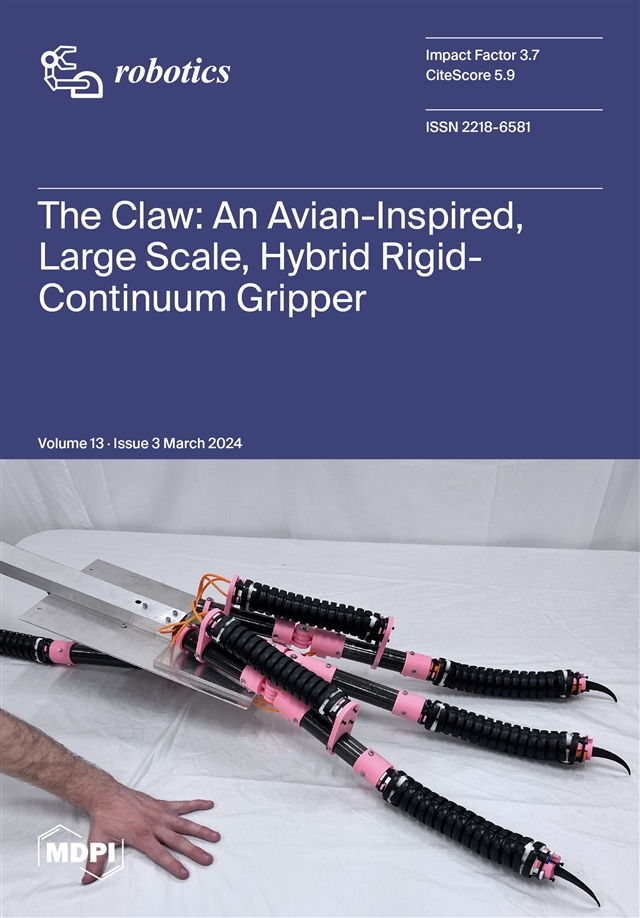
英文标题:The Claw: An Avian-Inspired, Large Scale, Hybrid Rigid-Continuum Gripper
中文标题:爪:一种受鸟类启发的大型混合刚性连续抓手
文章链接:https://www.mdpi.com/2218-6581/13/3/52
MDPI引用格式
Stokes, M.E.; Mohrmann, J.K.; Frazelle, C.G.; Walker, I.D.; Lv, G. The Claw: An Avian-Inspired, Large Scale, Hybrid Rigid-Continuum Gripper. Robotics 2024, 13, 52. https://doi.org/10.3390/robotics13030052
4.
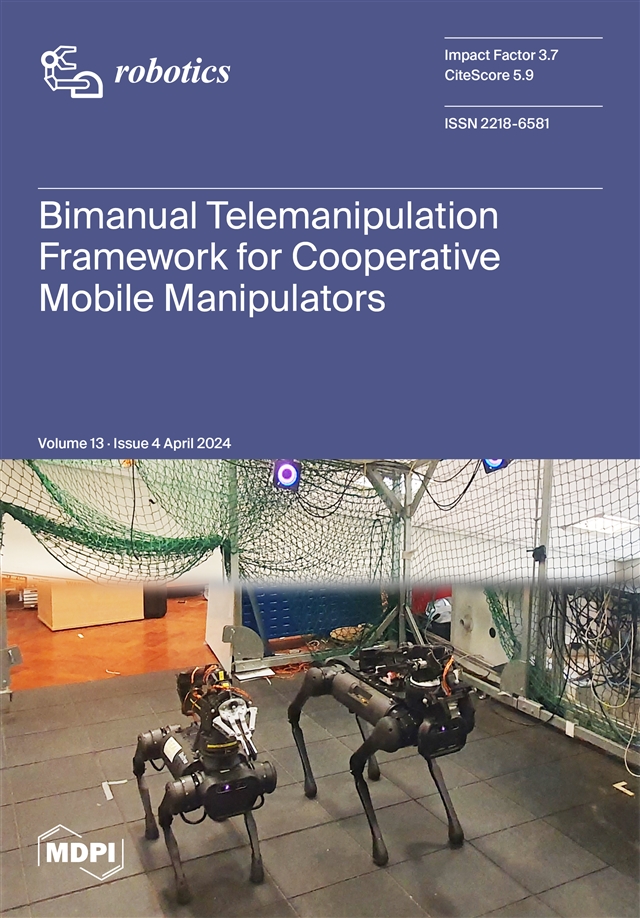
英文标题:Bimanual Telemanipulation Framework Utilising Multiple Optically Localised Cooperative Mobile Manipulators
中文标题:利用多光定位协同移动机械手的双手遥控框架
文章链接:https://www.mdpi.com/2218-6581/13/4/59
MDPI引用格式
Peers, C.; Zhou, C. Bimanual Telemanipulation Framework Utilising Multiple Optically Localised Cooperative Mobile Manipulators. Robotics 2024, 13, 59. https://doi.org/10.3390/robotics13040059
5.
英文标题:Visual Servoing Architecture of Mobile Manipulators for Precise Industrial Operations on Moving Objects
中文标题:面向运动物体精密工业操作的移动机械手视觉伺服体系结构
文章链接:https://www.mdpi.com/2218-6581/13/5/71
MDPI引用格式
González Huarte, J.; Ibarguren, A. Visual Servoing Architecture of Mobile Manipulators for Precise Industrial Operations on Moving Objects. Robotics 2024, 13, 71. https://doi.org/10.3390/robotics13050071
6.
英文标题:Design of a Spherical Rover Driven by Pendulum and Control Moment Gyroscope for Planetary Exploration
中文标题:行星探测用摆控力矩陀螺仪驱动球形漫游车的设计
文章链接:https://www.mdpi.com/2218-6581/13/6/87
MDPI引用格式
Melchiorre, M.; Colamartino, T.; Ferrauto, M.; Troise, M.; Salamina, L.; Mauro, S. Design of a Spherical Rover Driven by Pendulum and Control Moment Gyroscope for Planetary Exploration. Robotics 2024, 13, 87. https://doi.org/10.3390/robotics13060087
7.

英文标题:A Framework for Enhanced Human–Robot Collaboration during Disassembly Using Digital Twin and Virtual Reality
中文标题:基于数字孪生和虚拟现实的拆卸过程人机协作增强框架
文章链接:https://www.mdpi.com/2218-6581/13/7/104
MDPI引用格式
Hoebert, T.; Seibel, S.; Amersdorfer, M.; Vincze, M.; Lepuschitz, W.; Merdan, M. A Framework for Enhanced Human–Robot Collaboration during Disassembly Using Digital Twin and Virtual Reality. Robotics 2024, 13, 104. https://doi.org/10.3390/robotics13070104
8.
英文标题:Learning to Walk with Adaptive Feet
中文标题:用使用的脚学习走路
文章链接:https://www.mdpi.com/2218-6581/13/8/113
MDPI引用格式
Scaldaferri, A.; Angelini, F.; Garabini, M. Learning to Walk with Adaptive Feet. Robotics 2024, 13, 113. https://doi.org/10.3390/robotics13080113
9.
英文标题:A Control System Design and Implementation for Autonomous Quadrotors with Real-Time Re-Planning Capability
中文标题:具有实时再规划能力的自主四旋翼机控制系统设计与实现
文章链接:https://www.mdpi.com/2218-6581/13/9/136
MDPI引用格式
Kovryzhenko, Y.; Li, N.; Taheri, E. A Control System Design and Implementation for Autonomous Quadrotors with Real-Time Re-Planning Capability. Robotics 2024, 13, 136. https://doi.org/10.3390/robotics13090136
10.
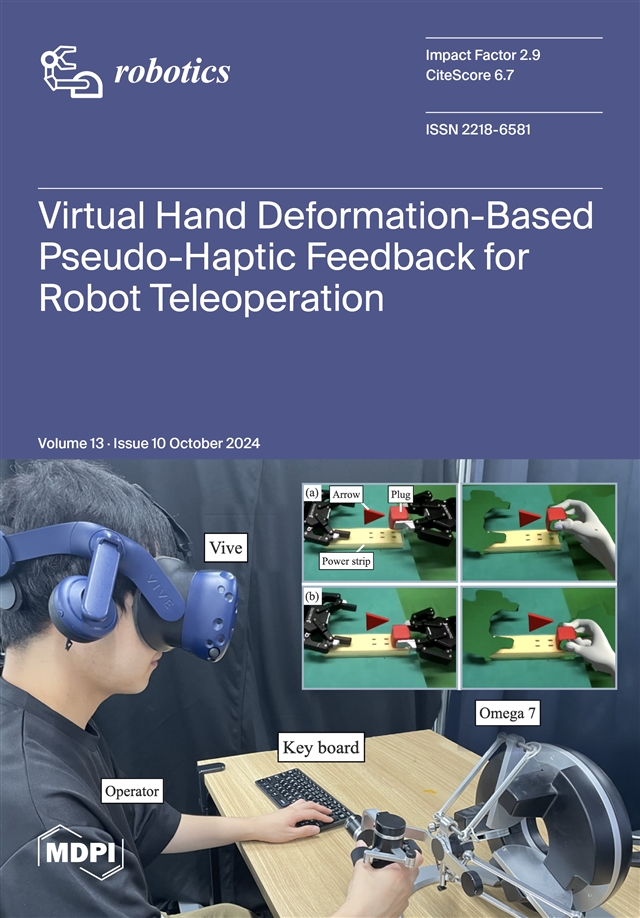
英文标题:Virtual Hand Deformation-Based Pseudo-Haptic Feedback for Enhanced Force Perception and Task Performance in Physically Constrained Teleoperation
中文标题:基于虚拟手变形的伪触觉反馈增强物理约束遥操作的力感知和任务性能
文章链接:https://www.mdpi.com/2218-6581/13/10/143
MDPI引用格式
Yamamoto, K.; Zhu, Y.; Aoyama, T.; Hasegawa, Y. Virtual Hand Deformation-Based Pseudo-Haptic Feedback for Enhanced Force Perception and Task Performance in Physically Constrained Teleoperation. Robotics 2024, 13, 143. https://doi.org/10.3390/robotics13100143
11.
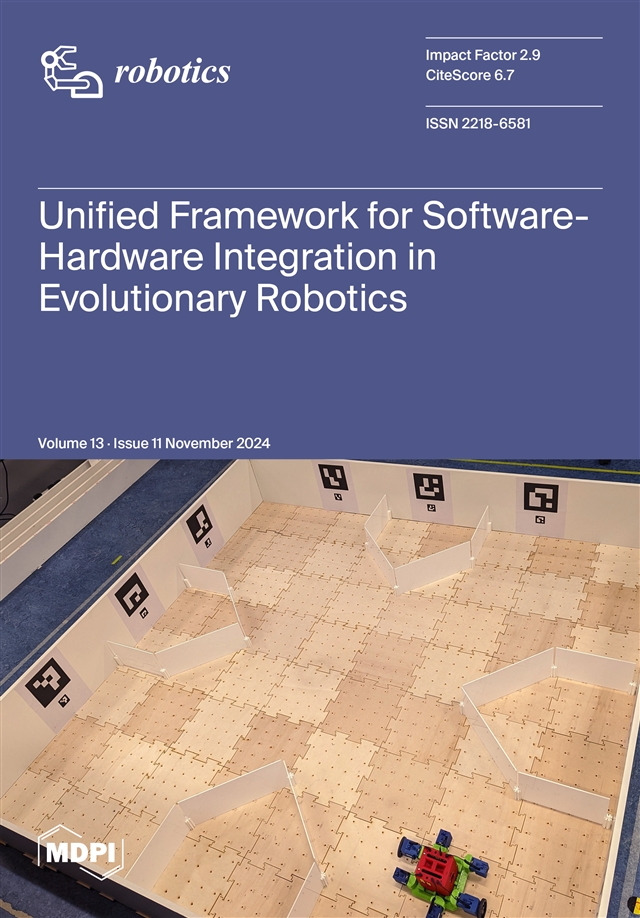
英文标题 Towards a Unified Framework for Software-Hardware Integration in Evolutionary Robotics
中文标题 进化机器人中软硬件集成的统一框架
文章链接:https://www.mdpi.com/2218-6581/13/11/157
MDPI引用格式
Buchanan, E.; Le Goff, L.K.; Hale, M.F.; Hart, E.; Eiben, A.E.; De Carlo, M.; Angus, M.; Woolley, R.; Timmis, J.; Winfield, A.F.; et al. Towards a Unified Framework for Software-Hardware Integration in Evolutionary Robotics. Robotics 2024, 13, 157. https://doi.org/10.3390/robotics13110157
12.
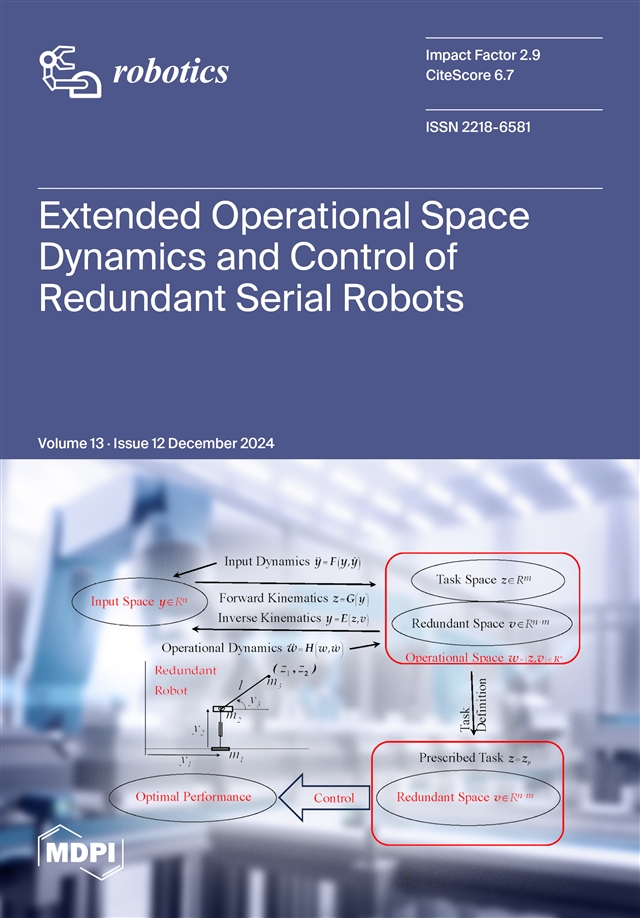
英文标题 Extended Operational Space Kinematics, Dynamics, and Control of Redundant Serial Robots
中文标题 冗余串联机器人的扩展操作空间运动学、动力学与控制
文章链接:https://www.mdpi.com/2218-6581/13/12/170
MDPI引用格式
Haug, E.J.; De Sapio, V.; Peidro, A. Extended Operational Space Kinematics, Dynamics, and Control of Redundant Serial Robots. Robotics 2024, 13, 170. https://doi.org/10.3390/robotics13120170
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






