|
|
|
|
|
新框架助力高速公路车辆碰撞检测,提升驾驶安全 Engineering |
|
|
论文标题:Reachability-Based Confidence-Aware Probabilistic Collision Detection in Highway Driving
期刊:Engineering
DOI:https://doi.org/10.1016/j.eng.2023.10.010
微信链接:点击此处阅读微信文章
伦敦玛丽女王大学 Xinwei Wang 领衔的国际研究团队,成功研发出一种基于可达性的置信度感知概率碰撞检测框架。相关研究以 “Reachability-Based Confidence-Aware Probabilistic Collision Detection in Highway Driving”(高速公路车辆行驶中基于可达性的置信度感知概率碰撞检测)为题在中国工程院院刊《Engineering》发表。
随着自动驾驶技术的发展,确保车辆在行驶过程中的安全至关重要。尤其是在高速公路场景下,车辆行驶速度快,一旦发生碰撞,后果不堪设想。此前的可达性分析方法,如前向可达集(FRS)和后向可达集(BRS),虽在驾驶安全验证方面有一定作用,但都存在过度保守的问题,容易导致误报风险事件。
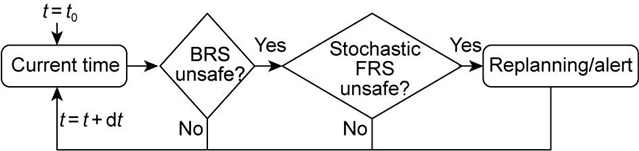
图 1. 集成碰撞检测框架示意图。t:当前时间步长;t0:初始时间步长。
此次研究提出的集成框架,创新性地结合了 BRS 和随机 FRS 两种技术。在该框架中,首先利用 BRS 通过 偏微分方程(HJI PDE)进行计算,检查双车交互是否安全。BRS 能直接识别不安全区域,若车辆相对位置不在 BRS 识别的不安全区域内,理论上可确保驾驶安全;若在不安全区域内,则进一步建立随机 FRS 来计算未来每个时间步长的碰撞概率。
为构建随机 FRS,研究团队开发了基于神经网络的周边车辆加速度模型。该模型分为变道机动预测和加速度预测两个阶段,利用长短期记忆(LSTM)网络,结合当前和历史车辆信息,概率性地预测未来车辆加速度。同时,研究人员还加入了置信度感知置信向量。当模型预测精度较高时,能产生集中的随机 FRS;当车辆意外移动时,则产生更分散的随机 FRS,从而动态调整预测的置信度,提高碰撞检测的准确性。
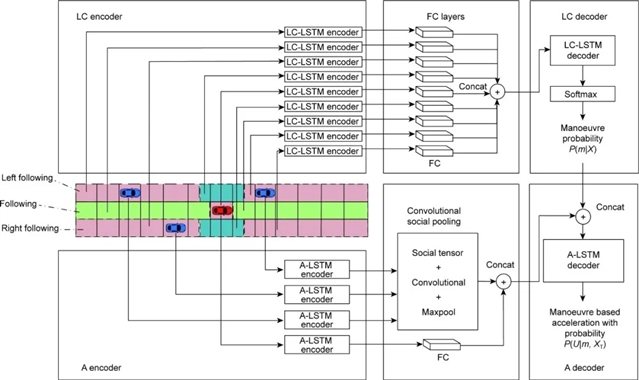
图 2. 加速度预测模型概述,由变道机动预测(LC)和加速度预测(A)模块组成。这两个模块都具有编码-解码器结构,但以不同的方式采用和处理历史信息作为输入。Concat:串联操作,FC:全连接层,T-LSTM:轨迹预测模型。
研究人员利用德国高速公路自然驾驶数据的 highD 数据集对加速度预测模型进行训练和测试,并与现有预测模型比较。结果显示,新提出的两阶段加速度预测模型(T-LSTMa)在各项指标上表现优异,预测精度更高。在对置信度感知的位置预测和碰撞估计的测试中,研究发现注入置信度感知能有效提高预测精度,特别是在变道场景中。而且,PSRS-5β 等基于预测的置信度感知方法,在识别风险插入事件中的潜在碰撞方面灵活且有效,还能避免安全临界但无碰撞事件中的误报。
此外,研究人员对集成碰撞检测框架进行测试,结果表明该框架能准确识别潜在碰撞事件。在计算效率方面,该框架适合实时风险评估应用,与 BRS 结合可节省时间,且在大多数车辆交互不重要的情况下,能降低功耗。
这一研究成果为高速公路驾驶安全提供了更可靠的保障。不过,目前该方法假设使用先进 GPU 进行计算,未来需实现更低功耗的硬件。同时,预测器的训练数据集还可进一步多样化,以拓展应用场景。相信在科研人员的不断努力下,未来的道路出行将更加安全。
引用信息:
Xinwei Wang, Zirui Li, Javier Alonso-Mora, Meng Wang. Reachability-Based Confidence-Aware Probabilistic Collision Detection in Highway Driving. Engineering, 2024, 33(2): 90–107

Open access
开放获取论文
https://doi.org/10.1016/j.eng.2023.10.010
更多内容
基于逆强化学习理论,智能车辆拟人化避障轨迹规划取得新进展
新型控制框架为智能网联汽车编队安全保驾护航
同济大学研究团队:基于安全合理探索与利用的自动驾驶自进化决策规划
浙大研究:完全自动驾驶汽车发生事故,乘客要担责吗?
李静海院士团队:未来数据系统的逻辑与架构
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。