|
|
|
|
|
FME文章荐读 | 围绕远程点灵巧运动的最新进展:机器人领域远程运动中心技术综述 |
|
|
论文标题:State of the art in movement around a remote point: a review of remote center of motion in robotics
期刊: Frontiers of Mechanical Engineering
作者:Wuxiang ZHANG, Zhi WANG, Ke MA , Fei LIU, Pengzhi CHENG, Xilun DING
发表时间:15 Apr 2024
DOI:10.1007/s11465-024-0785-3
微信链接:点击此处阅读微信文章

远程运动中心(RCM)的概念在无数机器人应用中至关重要,包括医疗机器人、定向设备和外骨骼系统等领域。RCM技术的有效性,往往决定了这些机器人系统能否成功运行。
《Frontiers of Mechanical Engineering》2024年第19卷第2期的一篇题为“State of the art in movement around a remote point: a review of remote center of motion in robotics”的综述文章,对远程运动中心(RCM)技术进行了全面回顾,涵盖RCM的概念、背景、实现方法、应用及未来挑战等内容,为相关领域的研究和应用提供了全面的参考。
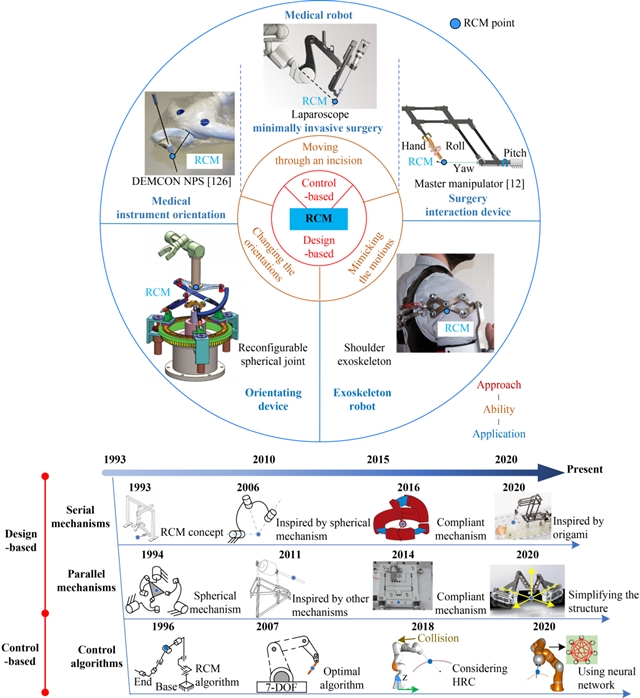
文章首先介绍了三维空间中RCM的概念和数学基础。RCM指能始终围绕空间内无物理关节的虚拟远程中心点进行转动或移动的运动,其运动中心点可位于末端执行器几何尺寸内或外。刚体在三维欧几里得空间自由运动有六个自由度,受RCM约束后最多有四个自由度。常见的RCM根据应用需求有不同的自由度类型,并分别对应不同的平面或空间运动。同时,还介绍了RCM的实现类型、自由度和性能分析等相关术语,用于构建评价和描述方法。
文章从串联RCM机构、并联RCM机构和RCM控制算法三个方面展开,探讨了RCM的实现方法。其中,串联RCM机构可通过运动副串联叠加设计,具有RCM运动特性的运动副包括旋转副、圆弧导轨、直线副,以及具有1-DOF RCM运动的广义运动副,不同自由度(1-DOF到4-DOF)的串联RCM机构有着不同的设计、应用及性能特点。并联RCM机构相比串联机构结构更复杂,其运动旋量系为所有支链运动旋量系的交集,不同自由度的并联RCM机构在设计特点、应用场景及性能分析上也存在差异。基于机构设计的RCM方法更安全且应用广泛,而基于控制算法的RCM方法主要用于医疗机器人,文章描述了满足RCM约束的机器人雅可比矩阵,从末端执行器RCM点约束算法、冗余串联机器人RCM算法、人机协作机器人RCM算法展开讨论,并讨论了近年来机器学习在该算法中的应用。
接着从医疗机器人、定位设备和外骨骼机器人三大领域展开RCM技术的应用场景讨论。在医疗机器人领域,RCM技术在微创手术中助力达芬奇等机器人系统通过微小创口执行复杂手术操作,如腹腔镜手术、眼外科手术等;在医疗仪器定位方面,针穿、超声成像等操作借助RCM实现精准定向;手术交互设备则依托RCM机构开发出多自由度触力觉遥操设备,提升主从操作同步性。定位设备领域中,刚性RCM如Agile Eye球面机构用于相机定向,柔顺RCM则应用于微定位平台以满足精密操作需求。在外骨骼机器人领域,肩、腕、髋等关节的外骨骼通过双平行四杆、球面RCM机构等同步人体关节运动,像Harmony康复外骨骼的肩部设计,实现自然运动同步与康复辅助。
最后围绕RCM技术发展进行了深入讨论。在控制与机构的对比上,指出RCM机构和RCM控制算法是实现RCM的两种不同路径,控制算法依赖自由度多于RCM运动需求的机器人,主要用于商业串联机器人微创手术等特定场景,RCM机构设计则注重创新性结构以适应不同应用。对于刚性与柔性的权衡方面,空间柔顺RCM点控制算法的应用可增强交互安全性但增加了算法复杂度,柔顺机构有减少尺寸、重量和提高精度等优势但设计分析更复杂。虽然众多研究针对RCM提出了不同的创新设计,但实际应用多采用简洁的RCM实现方法,未来RCM设计可转向针对不同运动需求的模块化、可重构结构配置方法研究,应用研究也可向足式机器人定点操作、立体制造末端定向机构等新兴领域进行拓展。
关键词
远程运动中心;机构学;机器人;医疗机器人;定向装置;外骨骼
引用
Wuxiang ZHANG(张武翔), Zhi WANG(王植), Ke MA(马克), Fei LIU(刘斐), Pengzhi CHENG(程鹏志), Xilun DING(丁希仑). State of the art in movement around a remote point: a review of remote center of motion in robotics. Front. Mech. Eng., 2024, 19(2): 14
https://doi.org/10.1007/s11465-024-0785-3
扫描二维码阅读原文
作者介绍

丁希仑,北航机械工程及自动化学院院?,教育部特聘教授(2014),国家级领军人才(2011),国家基金委“仿生机器人基础理论与关键技术〞创新研究群体负责人。在机器人机构学与仿生机器人研究方面取得了突出的成绩,累计在Nature Astronomy、Science Robotics、ASME/IEEE Transactions等权威国际期刊及重要国际会议上发表学术论文200余篇,出版学术专著34部,合作出版中文和英文著作各2部;获授权国家发明专利120余项,其中50余项已成功应用到多个国家重大型号工程中。成果获国家技术发明二等奖(2018年,排名1)以及教育部技术发明一等奖等部级科技奖励多项;担任国际机构与机器科学联合会IFTOMM机器人学和机械电子技术委员会委员,中国生产力促进中心协会服务机器人专委会、中国自动化学会人工智能与机器人教育专业委员会副主任委员,国际知名学术期刊Robotica和ASME open Journal of Engineering副主编,航空学报英文版及机械工程学报英文版编委等,曾担任ASME Transaction JMR(2013-2019)副主编、ASME/IEEE/IFTOMM等多个本学科领域国际会议的主席、组委会主席或分会主席。
精彩推荐
1.FME文章速览 | 不同冷却条件下铣削超高强度钢时刀具与工件界面摩擦学行为研究
2.FME文章荐读 | 改进的最小方差无失真响应谱方法在叶尖定时中实现高效且鲁棒的非均匀欠采样频率识别
3.FME文章速览 | 一种考虑蠕墨铸铁演化过程中的应变硬化和储存能效应的新应力-应变关系建模方法
4.文章速览 | 四足机器人节能型腿部弹性并联关节的动态柔顺性:设计与实现
5.FME文章速览 | 多材料增材制造——通过激光粉末床熔融过程中的激光重熔实现功能梯度材料
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。