
近日,浙江大学杨巍团队报道了活结式机械传动和机器人操作。相关论文于2025年11月26日发表在《自然》杂志上。
机械传动在从日常系鞋带到精密外科手术和机器人操作的各类力相关活动中至关重要。现代机械与机器人通常依赖复杂电子装置来感知并限制力,其中部分装置在操作空间受限(如微创手术)或资源匮乏(如无电力供应的偏远地区)时仍面临挑战。
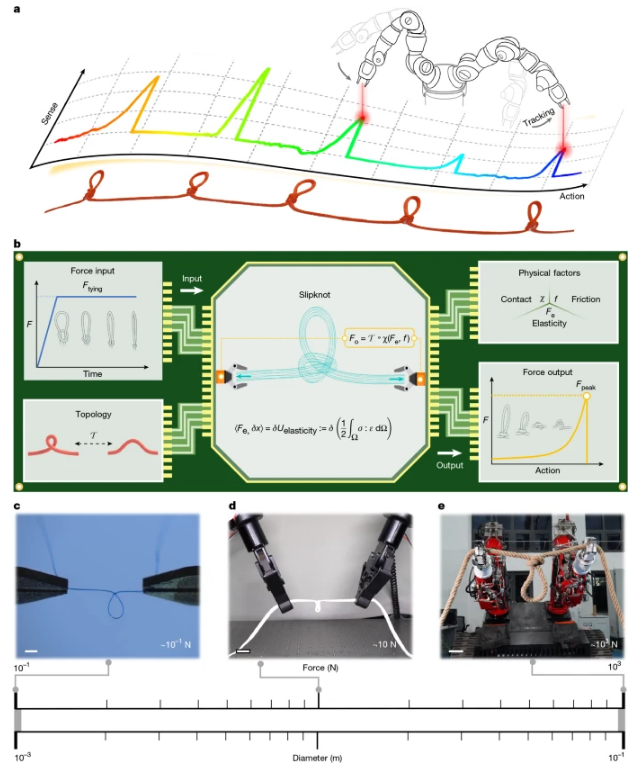
研究组描述了一种基于滑结的机械传动机制,可替代传统方案来控制人机系统的智能操作。通过拓扑设计,滑结的系结与释放可将力以95.4%的一致性精确编码并传递,无需额外传感器和控制器。应用于外科修复时,该机制使无经验外科医生的结扎力精度提升121%,其手术结质量达到资深医生水平。此外,术后血液供应和组织修复效果也显著改善。滑结中展现的力学智能可能启发对跨尺度缠结结构的探索。这种滑结量化的机械传动策略具有广泛部署潜力,为资源受限的医疗、科学教育和实地勘探开辟新可能。
附:英文原文
Title: Slipknot-gauged mechanical transmission and robotic operation
Author: Xue, Yaoting, Cao, Jiasheng, Feng, Tao, Zhang, Kaihang, Li, Siyang, Hu, Jiahao, Guo, Haotian, Zhang, Jinming, Song, Yaoxian, Wang, Zhuofan, Wang, Lei, Huang, Qishan, Zhou, Haofei, Zhou, Fanghao, Shen, Jiliang, Fan, Yaowei, Wang, Zhe, Li, Xinge, Wong, Jie-Wei, Chen, Zhiwei, Ruan, Dongrui, Miao, Zhikun, Zhang, Bin, Zhou, Enjie, Gan, Letian, Wang, Xuanqi, Cao, Ertai, Chen, Tong, Zou, Weifeng, Zhang, Junhui, Lu, Haojian, Zhang, Qinghai, Liu, Song, Dong, Huixu, Xiong, Shiying, Peng, Shuyou, Wong, Tuck-Whye, Chen, Yuanjie, Li, Tiefeng, Chen, Mingyu, Yang, Xuxu, Yang, Wei, Cai, Xiujun
Issue&Volume: 2025-11-26
Abstract: Mechanical transmission is essential in force-related activities ranging from the daily tying of shoe laces1 to sophisticated surgical2 and robotic operations3,4. Modern machines and robots typically use complex electronic devices designed to sense and limit force5, some of which still face challenges when operating space is limited (for example, in minimally invasive surgeries)6 or when resources are scarce (for example, operations in remote areas without electricity). Here we describe an alternative slipknot-based mechanical transmission mechanism to control the intelligent operation of both human and robotic systems. Through topological design, slipknot tying and release can encode and deliver force with a consistency of 95.4% in repeating operations, which circumvents the need for additional sensors and controllers. When applied to surgical repair, this mechanism helped inexperienced surgeons to improve their knotting-force precision by 121%, enabling them to perform surgical knots as good as those of experienced surgeons. Moreover, blood supply and tissue healing after surgery were improved. The mechano-intelligence exhibited in slipknots may inspire investigations of knotted structures across multiple length scales. This slipknot-gauged mechanical transmission strategy can be widely deployed, opening up opportunities for resource-limited healthcare, science education and field exploration. A mechano-intelligent transmission mechanism based on the slipknot delivers precise force signals for clinical practice and robotic operations such as minimally invasive surgery and tendon-driven robotics.
DOI: 10.1038/s41586-025-09673-w
Source: https://www.nature.com/articles/s41586-025-09673-w
Nature:《自然》,创刊于1869年。隶属于施普林格·自然出版集团,最新IF:69.504
官方网址:http://www.nature.com/
投稿链接:http://www.nature.com/authors/submit_manuscript.html