近日,暨南大学的辛洪宝教授团队在光控软体生物微机器人领域取得了新进展。该团队利用光学方法将自然界中广泛存在的一种微藻(纤细裸藻)构建成具有高可控性、可形变、和高环境适应性的软体生物微机器人,该软体生物微机器人可以在肠道等狭窄且多变的复杂微环境中执行多种生物医学任务,例如精准药物递送、病变细胞移除、光动力治疗等。
相关研究成果以“Light-controlled soft bio-microrobot” 为题发表在Light: Science & Applications。该研究工作得到了国家重点研发计划青年科学家项目和国家自然科学基金委项目等的支持。暨南大学纳米光子学研究院的博士生熊建云和李醒为本文的共同第一作者,辛洪宝教授为论文通讯作者,该工作得到了李宝军教授的大力支持。
微纳机器人因其相较于传统工具具有体积小、可控性高、能够精确导航的特点,被广泛用于微环境中执行复杂的生物医学任务,如精准检测、靶向药物输送、精准治疗等。然而,很多生物医学环境(例如血管、肠道微环境)是形貌多变的,传统的刚性微机器人由于无法发生形变,因此难以作用于这些复杂的微环境中。为了在这些形貌多变的微环境执行多功能精准微操作,具有高度可控性、可变形性和高环境适应性的软体微机器人的研制具有重要意义。然而,在构建软体微机器人的过程中,具有高生物兼容的材料选择及可执行多重任务的目标实现是一个极大的挑战。
鉴于此,暨南大学辛洪宝教授团队提出了光控软体生物微机器人的方案,他们选择了自然界中广泛存在的微藻(纤细裸藻)作为构建软体生物微机器人的基本材料,他们发现这种裸藻具有良好的生物兼容性,与细胞共培养的过程中,不会对细胞的活性产生影响,且在共培养的3天内,裸藻将自然降解。由于纤细裸藻的光敏感蛋白对蓝光极为敏感,他们使用波长为450 nm的蓝光实现了对纤细裸藻的精准导航和形变控制,进一步将其构建成能执行多种生物医学任务的软体生物微机器人(Ebot)(图1)。凭借Ebot的可变形性和对不同环境的高适应性特点,成功实现了Ebot在微流通道、肠道黏膜等不同狭窄多变微环境中执行靶向药物输送、选择性移除病变细胞、目标区域光动力治疗等多种生物医学任务(图2)。

图1:纤细裸藻的结构示意图及在蓝光控制下调控成Ebot的示意图。

图2:Ebot在复杂多变的生物微环境中执行多功能任务的示意图。
Ebot的精准导航
构建的Ebot在蓝光控制下具有三种运动模式,即螺旋、多边形和旋转游动。这三种运动模式与鞭毛的摆动方式密切相关。研究表明通过控制光照强度和光照时间可精准的调控鞭毛的摆动。在弱光(100 lx)照射时,光敏感蛋白通道未被激活,此时鞭毛为 “8字形”,Ebot呈螺旋游动(图3a)。由于纤细裸藻在运动时绕其长轴滚动,因此,在中等光强度(1000 lx)照射下,光敏感蛋白通道被周期性激活,所以鞭毛的摆动方式在“8字形”和“旋转套索”间周期性切换,Ebot呈多边形游动(图3b)。然而,在高光强(3000 lx)照射下,此时光敏感蛋白通道始终处于激活状态,鞭毛呈“旋转套索”型,Ebot为旋转游动(图3c)。而关闭光源后,Ebot便沿着固定角度游动。基于此,Ebot能够通过光学控制进行精准的运动导航。基于该精准运动导航,Ebot可以在复杂多变的微环境中进行精准运动。视频1展示了通过对Ebot进行精准导航,使其成功穿越一个地形复杂的微流迷宫的结果,而没有光照的情况下,纤细裸藻迷失在迷宫中。
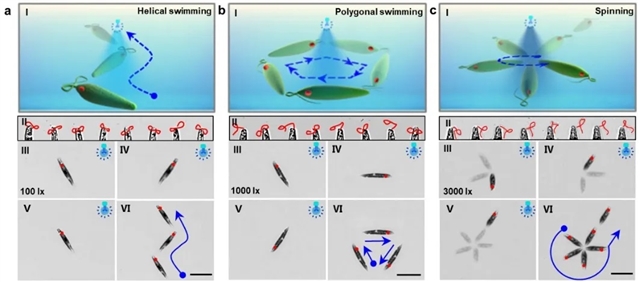
图3:Ebot在不同光照强度下的三种运动模式(a)弱光照射下的螺旋游动(b)中等光强度照射下的多边形游动(c)高光强照射下的旋转游动。
Ebot的可控形变
除了运动和导航的精准控制外,Ebot还能通过光控实现可控形变。在高光强照射下,Ebot会出现从梭形到球形的形变(图4a)。这是因为,高强度光的持续照射会改变细胞膜钙离子的流动,进一步引起鞭毛不规则且快速的摆动,由于鞭毛位于微管构建的鞭毛袋中,鞭毛袋与纤细裸藻表皮的横膜紧密相连,因此,鞭毛不规则且快速的摆动会拖动鞭毛袋中的微管运动,进而带动纤细裸藻表皮的横模滑动,最终Ebot表现出弯曲、拉伸和收缩等形变。Ebot可控的形变性赋予了它刚性微机器人所不拥有的穿越狭窄微型空间的能力(图4bc),使得Ebot能够在狭窄的生物微环境中执行多重任务。
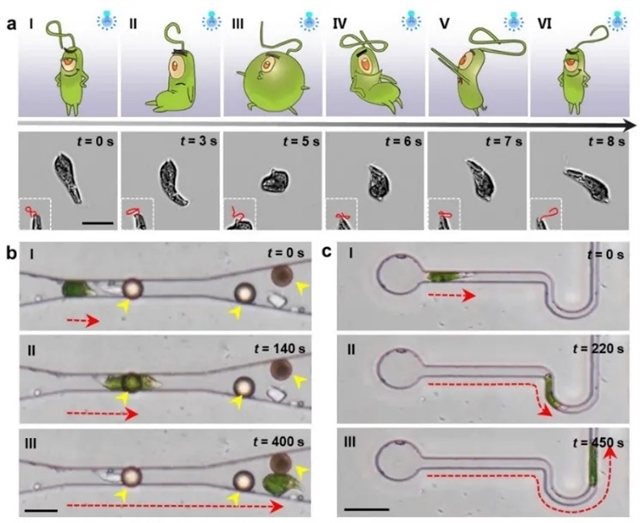
图4:(a)Ebot在蓝光作用下的可控形变。(b)Ebot穿越三维受限微流通道以及(c)弯曲的微流通道。
执行多种生物医学任务
结合Ebot的精准导航以及可控形变的特性,Ebot可以在多变的微环境中执行多种生物医学任务。例如,通过精准控制Ebot的运动以及形变,可以将负载的药物精准释放在细胞簇的指定细胞中,进一步精准杀死目标细胞(图5a)。通过调控Ebot的形变还可以在细胞簇中选择性移除指定病变细胞(图5b)。这种任务执行能力可以直接在更为复杂的微环境中实现,例如,Ebot可以作用于肠道中,穿越蜿蜒多变的肠道容貌间隙,进行精准药物递送(图5c)及颗粒移除(图5d)。

图5:(a)Ebot对细胞簇中的指定细胞进行精准药物递送。(b)Ebot选择性移除细胞簇中的病变细胞。(c)Ebot在肠道绒毛间隙环境中进行精准药物递送。(d)Ebot去除肠道绒毛间隙中的多孔二氧化硅颗粒。
更为重要的是,由于纤细裸藻细胞富含叶绿素,使得构建的Ebot能够进行光合作用产生氧气。并且叶绿素在670nm的激光照射下能够被还原成叶绿素衍生物,例如二氢卟酚。这种物质是天然的光敏剂,可以将合成的氧气转化成活性氧,进一步实现光动力治疗。结合Ebot的精准导航,首先利用蓝光光源可控导航Ebot到目标区域,然后利用波长为670nm激光束照射细胞从而产生活性氧,可以实现对肿瘤细胞的光动力治疗(图6)。

图6:(a)Ebot的精准导航,(b)Ebot活性氧产生效果,(c)Ebot的光动力治疗效果。
总结与展望
本研究成功将自然界中广泛存在的纤细裸藻构建成光控软体微机器人(Ebot)。在不同光照强度和光照时间的调控下,实现了对Ebot的精准导航和可控形变。这两种特性使Ebot在狭窄复杂的微环境中有着执行多重生物医学任务的能力。而且Ebot作为基于藻类构建的软体微机器人,还能够利用藻类光合作用的功能丰富Ebot执行生物治疗任务的方法,与传统的刚性微机器人相比有着更强的适应性以及功能多样性。这种光控软体微机器人为多功能生物医学精准微操作提供了一种新的生物微机器人工具,在狭窄且复杂多变的微环境中执行多功能生物医学任务领域具有极大的应用前景。
通讯作者简介
辛洪宝,暨南大学教授、博士生导师、物理与光电工程学院副院长、纳米光子学研究院副院长、教育部青年长江学者、国家重点研发计划青年科学家、广东省杰青。本科和博士毕业于中山大学,之后在新加坡国立大学和加州大学伯克利分校进行博士后研究,于2018年7月加入暨南大学纳米光子学研究院。课题组长期从事生物光子学和微纳光子学的研究,主要研究兴趣包括光镊与生物光学操控、光控生物微纳机器人与细胞功能调控、纳米等离激元与生物分子探测等。任APL Photonics、中国激光等期刊青年编委。在Nature Photonics、Nature Reviews Materials、Light: Science & Applications(3篇)、Nature Communications等发表论文50余篇。课题组( www.hbxinlab.com )有1个青年教师岗位空缺,欢迎感兴趣的青年教师和博士后联系。(来源:LightScienceApplications微信公众号)
相关论文信息:https://doi.org/10.1038/s41377-024-01405-5
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






