|
|
|
|
|
中国科学院北京纳米能源与系统研究所唐伟团队:基于摩擦纳米发电机的矢量角度/位移传感器 | MDPI Micromachines |
|
|
论文标题:A Self-Powered Vector Angle/Displacement Sensor Based on Triboelectric Nanogenerator(基于摩擦纳米发电机的自供电矢量角/位移传感器)
期刊:Micromachines
作者:Chengyu Li, Ziming Wang, Sheng Shu and Wei Tang
发表时间:25 February 2021
DOI:10.3390/mi12030231
微信链接:
https://mp.weixin.qq.com/s?__biz=MzI1MzEzNjgxMQ==&mid=2649999304&idx=3&sn=
d0292156b0976c653d97ab31c24f0006&chksm=f1de7d0cc6a9f41ad837a9c499419268
876af319f04a90a34d58169ef026a773f0ea97cbc66f&token=1585640575&lang=zh_CN#rd
期刊链接:
https://www.mdpi.com/journal/micromachines
通讯作者

唐伟
中国科学院北京纳米能源与系统研究所
唐伟,中国科学院北京纳米能源与系统研究所研究员,中国微米纳米技术学会高级会员。于2013年取得北京大学理学博士学位,近年来致力于纳米发电机与可穿戴电子领域的研究,取得了一系列重要的原创性成果。至今已发表学术论文70余篇,以第一作者和通讯作者发表论文40余篇,包括Energy Environ. Sci.、Nat. Commun.、Adv. Mater.、Adv. Funct. Mater.、Microsyst. Nanoeng.、ACS Nano、Nano Energy等,SCI引用超过5000 次,h 指数为38;申请专利30余项,已授权16项;出席国际会议20余次,多次作邀请报告,并担任程序委员会成员、分会主席;主持国家自然科学基金、北京市科委重大项目——怀柔科学城创新专项等,参与国家重点研发计划纳米科技重点专项;获评北京市科学技术二等奖 (2017)、三等奖 (2018)、中国科学院青年创新促进会会员 (2018) 等。
引言
摩擦纳米发电机 (TENG) 是利用摩擦起电效应和静电感应效应的耦合将微小的机械能转换为电能的一种设备。它有四种工作模式 (如图1所示)[1],分别是垂直接触-分离模式、水平滑动模式、单电极模式和独立层模式。因独特的工作原理及效率高、成本低、耐用、环境友好等优点,它被广泛应用于可穿戴电子产品、能量收集和自供电传感器等领域。

图1. 摩擦纳米发电机 (TENG) 的四种工作模式。(A) 垂直接触-分离模式;(B) 水平滑动模式;(C) 单电极模式和 (D) 独立层模式。
近期,来自中国科学院北京纳米能源与系统研究所的唐伟研究员及其研究团队在Micromachines 期刊上发表了一篇论文,设计了一种新型结构的摩擦纳米发电机 (如图2所示)。它由一组光栅独立电极和三组具有相同周期的叉指式感应电极组成,是一种能够获取独立层电极实时位移量和运动方向的自驱动矢量角度/位移传感器 (SPVS)。本文作者设计了两种不同形状的SPVS:圆盘形与条形。作者分别对这两种不同形状的SPVS进行了电气输出性能表征。
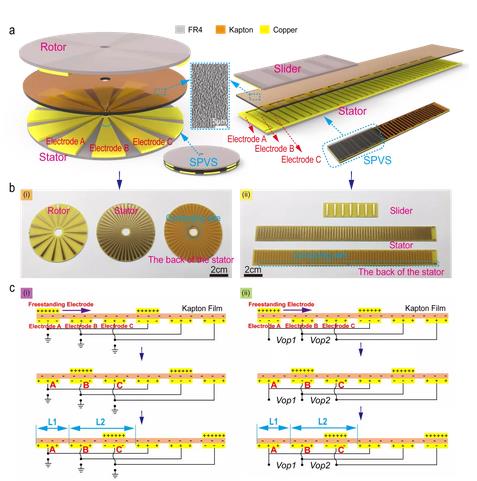
图2. 自供电矢量角度/位移传感器 (SPVS) 的结构设计和工作原理。(a) 圆盘形 (左) 和条形 (右) SPVS的结构示意图,及它们所对应的转子 (滑块) 和定子的放大图。中间插图为Kapton薄膜表面蚀刻的具有纳米棒形貌的扫描电子显微镜 (SEM) 图像 (比例尺:5 μm);(b) 圆盘状和条状SPVS的光学照片,其中一组叉指电极通过其底部定子上的导线连接在一起;(c) 在两种不同检测模式下,SPVS的工作原理示意图。
工作原理:SPVS的工作原理如图2c (i) 和 (ii) 所示,分别代表两种不同的检测方法。图2c (i)显示了其中一种检测方法,每个底部电极都连接到测量设备,测量设备的另一端接地。图2b (ii) 显示了另一种检测方法,其中底部三电极之一用作公共端,例如电极B,另外电极A和C充当两个输出端,形成两个输出电压端口 (Vop1和Vop2)。当顶部独立层电极沿着Kapton薄膜表面旋转/滑动时,将产生接触感应电荷,并在两种摩擦电层材料 (金属铜电极和Kapton膜) 的表面上积累。在初始阶段,由于摩擦起电和静电感应的相互耦合作用,与顶部独立电极重叠的底部电极A的表面将带负电。相反,不重叠的电极 (底部金属电极B和C) 将带正电。此后,随着独立层电极连续旋转/滑动,底部电极A/B/C表面将交替感应出电荷,从而在外部形成交变感应电动势。通过使用两种不同的检测方式可以获得具有固定相位差的几组电压信号。对于第一种检测方法 (底部电极接地),当转子向左或向右滑动时,自由电子不断从电极A/B/C流向地面,直到转子返回其初始状态,形成三组具有固定相位差的电压信号。对于第二种检测方法,自由电子从电极A流向电极B (或从电极B流向电极C),直到转子达到最终状态,在该状态下,两个电极上的电荷密度与初始状态相比极性相反,同样,在这种检测方式下,也可以形成具有固定相位差的两组电压信号。因此,通过对SPVS输出模拟信号的处理和分析可以实现对独立层电极运动信息的实时传感,例如运动方向、滑动位移 (或旋转角度) 和速度的传感。
测试结果
1. 条形SPVS
采用第一种检测方法时,如图4a-b所示,当滑块从左向右滑动时,底部金属电极A/B/C将感应得到三组具有固定相位差为L1的电压信号,它们可以描述为“AB、BC和CA”,其中字母A、B、C分别代表电极A、B、C的输出电压波形曲线。在0.1 m/s的滑动速度下,SPVS的峰峰值电压高达300 V,该电压信号的波形类似于叠加三角波和方波的变化,与理论分析相同。随后,随着滑块从右向左滑动 (图4a-c),底部金属电极A/B/C还将实时感应出三组电压信号,即“CB、BA和AC”。按照上述方法,一旦滑块的滑动位移大于最小分辨率L1,上面提到的六种波形之一就会出现。可以通过公式L = N×L1计算滑块的滑动位移L,其中N可以通过峰值计数算法获得。采用第二种检测方法时,如图4d,e-f所示,由于底部两个相邻电极之间的物理距离不同,当滑块从左向右或从右向左滑动时,将连续产生两组具有固定相位差等于L1的电压信号,L = N×(L1 + L2)= 3L1,其中L2 = 2L1。通过分析可知,使用第一种检测方法的SPVS的分辨率高于使用第二种检测方法的SPVS的分辨率。但是,与第一种连接方法相比,第二种连接方法的SPVS信号处理算法更简单,因为仅涉及两组信号。

图4. 条状SPVS的电气输出性能表征。(a) 在第一种检测模式下,滑块向左滑动 (b) 和 (c) 向右滑动时,SPVS的电气输出。(d) 在第二种检测模式下,滑块向左滑动 (e) 和 (f) 向右滑动时,SPVS的电气输出。.
2. 圆盘形SPVS
图5展示了使用伺服电机测试的圆盘形SPVS的测量结果。对于第一种三组底部电极接地的检测模式,转子分别以24、48、96和192 rpm的转速相对于定子顺时针旋转,测量结果如图5 (ai–iv) 所示。经过优化后,其峰峰值电压值高达400 V,同时具有非常显著的相位关系。同样,当转子以相同的转速逆时针旋转时,可以获得另外三组不同相位的输出电压曲线 (图5 (bi–iv) ),其峰峰值电压同样高达400 V。具有矢量特性的测量输出结果显示出基于TENG技术构建的自驱动矢量测量传感器的优势和可行性。另一方面,在第二种检测模式下,测量圆盘形SPVS的输出电压结果如图5 (ci–iv) 和5 (di–iv) 所示,在这种检测模式下,输出电压峰峰值可以达到约500 V,且在不增加摩擦面积的情况下实现了矢量角度的传感,进一步验证了基于TENG的自供电矢量传感器的可行性。

图5. 圆盘形SPVS在不同检测模式下的电气输出测量结果。(a,b) 在第一检测模式下,圆盘形SPVS在顺时针和逆时针,旋转速度分别为24、48、96和192 rpm时的输出电压。(c,d) 在第二种检测模式下,圆盘形SPVS在顺时针和逆时针,旋转速度分别为24、48、96和192 rpm时的输出电压。
结论
这项工作提出了一种基于独立层结构式TENG的新型自驱动矢量角度/位移传感器 (SPVS),该传感器由三组具有相同周期的叉指电极组成。通过检测来自不同通道的输出电压之间的相位差,并计算波峰总数,可以实现对转子/滑块运动的矢量传感。另外,作者还提出了两种检测方法,根据实际需求,这两种方法均可以单独运用并实现矢量角度/位移的传感。此外,与基于TENG的其他角度/位移传感器相比,基于三电极光栅结构式TENG的新型SPVS具有如下主要优点:(1) 在不降低输出电压且不增加摩擦电层面积的情况下,SPVS可用于对具有矢量特征的运动进行定量分析。(2) SPVS的分辨率达到8°/ 5 mm,同时可以通过减小电极的宽度进一步提高分辨率。(3) SPVS的制造工艺稳定,成本低廉,适合大规模推广。此外,圆盘状SPVS可应用于对关节运动、水流和机械轴承等的实时动态传感,而条状的SPVS可作为自供电的可拉伸传感器、位移传感器和液滴传感器等。
期刊介绍
Micromachines (ISSN 2072-666X; IF 2.523) 是一个与微纳米技术领域相关的国际型开放获取期刊,期刊范围涵盖微纳米结构、材料、设备和系统等各方面的研究与应用。目前期刊已被SCIE (Web of Science)、Ei Compendex、Scopus等数据库收录。Micromachines 采取单盲同行评审,一审周期约为12.5天,文章从接收到发表仅需1.9天。


特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






