柔性电子器件的应用场景包括健康监测、医疗手术、智能工业以及具有柔性大变形特征的航空航天设备,而柔性大应变传感器是其中监测变形的关键元件。传统基于金属或半导体的应变片无法满足与人体或柔性设备表面共形贴合的基本要求,并且传感范围比实际需求小。现有柔性大应变传感器多是基于接触电阻机制,即通过各种传感材料及相应微结构设计实现导电微结构的接触关系变化(从接触到分离的变化,或涉及渗流效应与隧道效应的远近关系变化),以此形成传感器的可拉伸性和电阻变化。此类柔性大应变传感器常用碳基材料(包括碳纳米管、石墨烯、碳化丝绸、炭黑等)或金属纳米线及纳米颗粒制备,相应的微结构有类弹簧结构、岛隙结构、屈曲鞘芯纤维结构和类鱼鳞结构等。这些应变传感器通常具有较大的传感范围和灵敏系数,但其电学响应的重复性和线性度有待提高,原因是其核心传感机理涉及到不稳定的接触关系:接触表面上复杂的滑移、摩擦和黏附关系;微结构的非线性变形;接触模式的转换。
近日,中国科学院力学研究所研究员苏业旺团队设计并制备出无接触电阻式柔性大应变传感器(图1),包含一个偏轴蛇形叠层结构(蛇形聚酰亚胺基底与覆盖层、偏离中心轴的蛇形康铜箔)和两层弹性封装层,其通过偏轴蛇形叠层结构中的拉伸-弯曲-拉伸变换机制实现0-50%的应变传感范围。理论分析、有限元模拟与实验测试(图2、图3)的结果综合表明,当传感器的圆弧段半径较大、聚酰亚胺基底宽度较窄、直线段较长和封装层较厚时,可以获得较大且稳定的弹性传感范围。在传感过程中,由于敏感材料康铜部分既不产生不稳定的接触电阻,也不涉及非线性本构和几何关系,该传感器保证了高重复性(重复性误差=1.58%)和高线性度(拟合优度>0.999)。进一步地,研究利用特殊设计的偏轴蛇形叠层结构和惠斯通电桥电路实现了温度自补偿功能(图4),最终传感器的输出电压温度系数可小至5×10-7°C-1。如图5所示,该传感器可以应用于监测颈部、手指和眼部等的人体实时运动,如眨眼、发声和呼吸等;测量外科手术中组织变形,如全膝关节置换手术;监控柔性航天航空设备的应变状态,如降落伞和高空气球等。
该传感器被应用于中国首颗火星探测器降落伞地面实验,在风洞内巨大温度变化、高速气流冲击和伞体剧烈晃动的情况下,应用该传感器对缩比降落伞的伞绳应变进行了实时监测,为降落伞优化设计提供了指导意见,为2021年5月15日“天问一号”探测器在火星成功着陆做出了贡献。项目评审组高度评价:“所开发的柔性传感器及配套方案具有实用性、创新性和可扩展性,未来还可进一步用于其他柔性回收着陆设备”。

图1.传感器的设计、制备和机理

图2.偏轴蛇形叠层结构的力学和电学特性
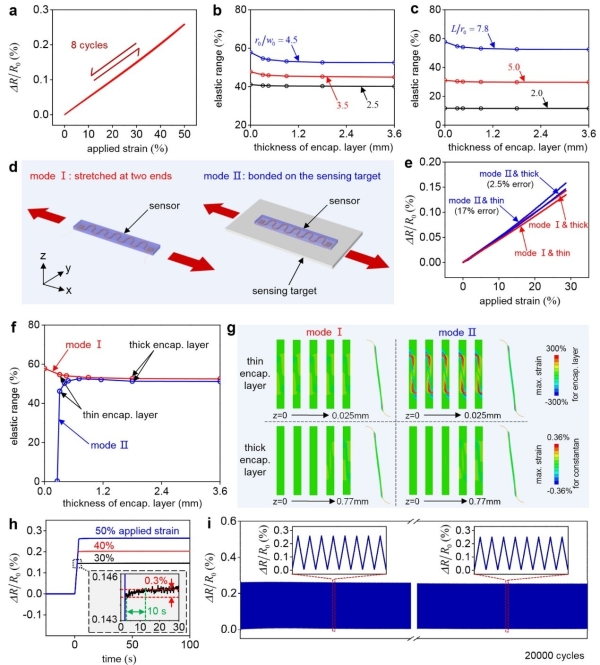
图3.封装后应变传感器的力学和电学特性
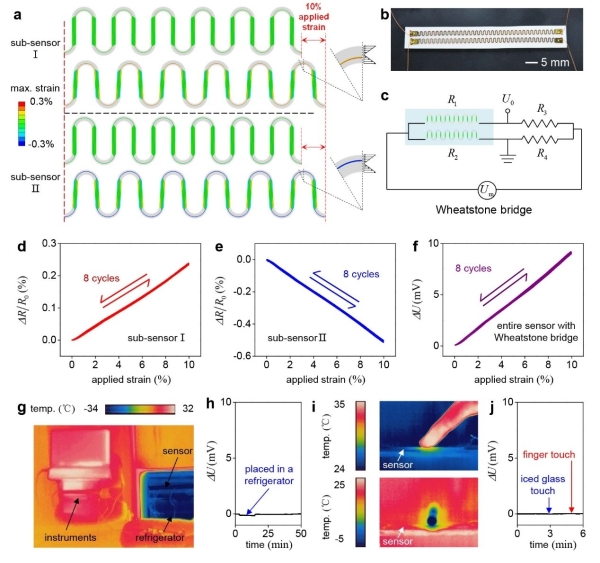
图4.温度自补偿设计

图5.人体活动监测、医疗手术和航天设备中的典型应用
相关研究成果以Contact-Resistance-Free Stretchable Strain Sensors with High Repeatability and Linearity为题,近期发表于学术期刊ACS Nano。研究工作获得大连理工大学、北京积水潭医院、航天五院科研人员的帮助和支持,并得到国家自然科学基金委面上项目、中科院基础前沿科学研究计划“从0到1”原始创新项目和北京市科委等的支持。(来源:中国科学院力学研究所)
相关论文信息:https://doi.org/10.1021/acsnano.1c07645
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。