麻省理工学院(MIT)研究人员花费十余年时间研究相关技术,使机器人能够通过“透视”障碍物发现并操控隐藏物体。这些方法利用可穿透障碍物并反射自隐藏物品的表面穿透无线信号。
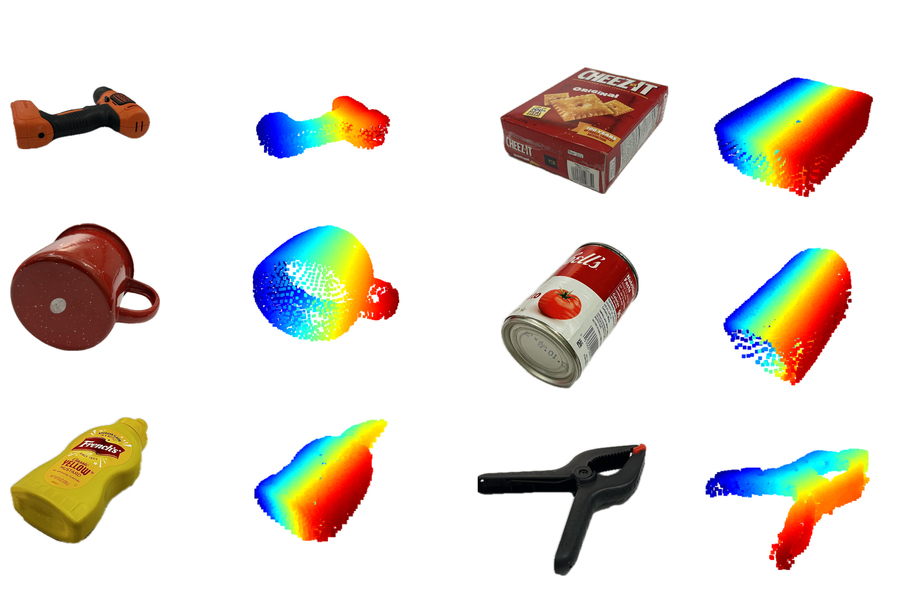
如今,研究人员正借助生成式人工智能模型,攻克此前限制方法精度的长期瓶颈。这项新技术能根据反射无线信号构建隐藏物体的局部模型,并利用经过特殊训练的生成式AI模型补全其缺失的形态部分。相关研究成果发表于arXiv。据MIT最新透露,论文将在IEEE国际计算机视觉与模式识别会议上展示。
研究团队还引入了一套扩展系统,利用生成式AI精准重构包含所有家具的完整室内场景。该系统利用固定雷达发射的无线信号,这些信号在空间中移动的人体表面发生反射。
这克服了现有多种方法的关键难点,后者通常需将无线传感器安装在移动机器人上以扫描环境。与某些基于摄像头的流行技术不同,该方法能保护环境中人员的隐私。
 借助这项新技术,机器人可利用反射的Wi-Fi信号更精准地探测隐藏物体或理解室内场景。图源:MIT
借助这项新技术,机器人可利用反射的Wi-Fi信号更精准地探测隐藏物体或理解室内场景。图源:MIT
这些创新可使仓库机器人在发货前核验包装物品,减少退货造成的浪费;亦可使智能家居机器人感知人员在房间中的位置,提升人机交互的安全性与效率。
“我们现在所做的是开发生成式AI模型来解读无线反射信号。这不仅开启了众多有趣的新应用,从技术层面更是一次能力的质的飞跃,从填补此前无法观测的空白,到能够解析反射信号并重构完整场景。”MIT电气工程与计算机科学系副教授、两篇论文的通讯作者Fadel Adib表示,“我们正利用AI最终实现无线视觉。”
未来,研究人员希望提升重构的颗粒度与细节丰富度。他们还计划构建无线信号领域的大型基础模型——类似语言与视觉领域的GPT、Claude、Gemini等基础模型——这将开启全新的应用可能。
相关论文信息:
https://doi.org/10.48550/arXiv.2511.14152
https://doi.org/10.48550/arXiv.2511.14019
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。