1月21日发表于《自然-通讯》的一篇论文描述了一个能爬行和抓握物体的可拆卸机械手,它能抓取超出正常范围的物体并完成多对象处理任务,有望应用于工业、服务业和勘探业机器人。
 图片来源:高晓
图片来源:高晓
机械手的设计常模仿高度灵巧的人类手部。然而,人手仅能从单面抓握的非对称结构以及有限的抓取范围限制了其执行特定任务的能力,如同时抓取多个物体或进入狭窄空间。
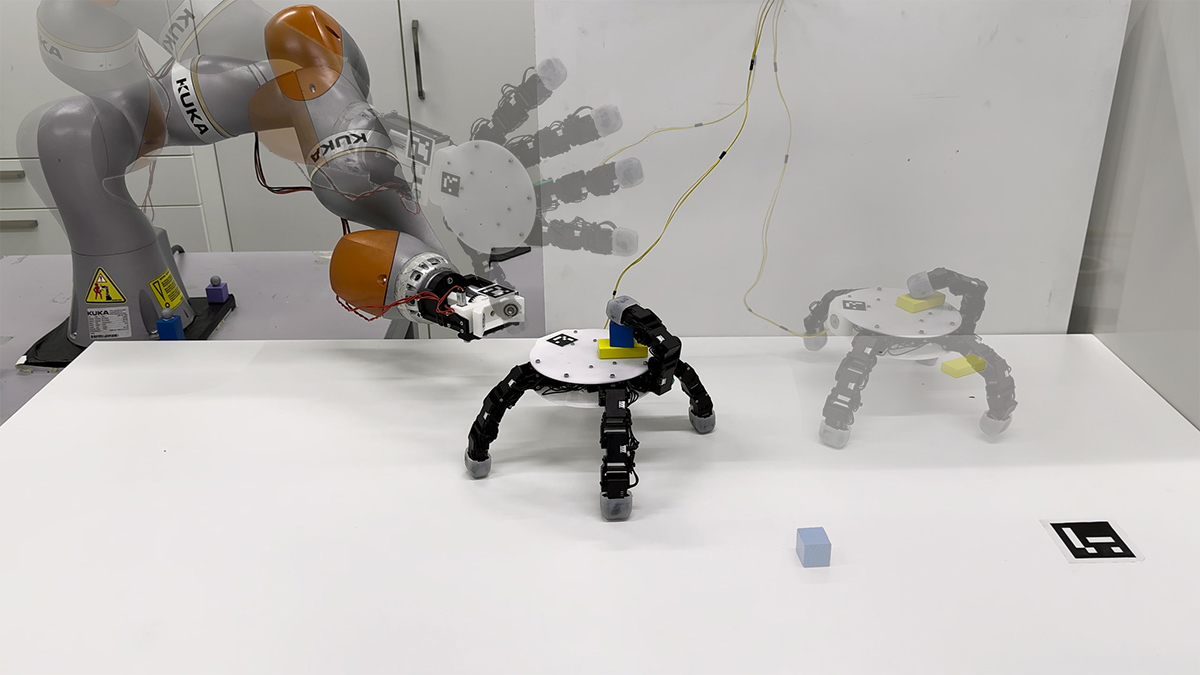
在这项研究中,瑞士洛桑联邦理工学院的高晓(音)和同事展示了两种版本的机械手,分别为5指设计和6指设计,手掌直径16厘米,均为对称结构,可实现双面抓握。这种机械手还能从机械臂基座上脱离并爬行。
研究人员演示了该机械手可连续抓取最多3个物体,并在安全抓握物体的同时重新连接机械臂。该机械手可安全抓握多种类型的日常物体,包括卷筒芯、橡胶球、白板笔和罐头。它还能模仿33种人类抓握形式,并握住重达2千克的物体。
研究人员表示,未来研究可探索这类技术的潜在应用,如进入狭窄空间并开展任务。
相关论文信息:https://doi.org/10.1038/s41467-025-67675-8
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






