|
|
|
|
|
西安光机所研发的激光雷达三维成像系统可提高能量利用率100倍 |
|
同时实现3倍横向空间分辨率提升 |
单光子雪崩二极管(SPAD)阵列像素填充率低、阵列规模小等问题导致其难以满足高空间分辨三维成像的要求,中国科学院西安光学精密机械研究所超快光科学与技术全国重点实验室张同意研究员团队设计并构建了一套基于SPAD阵列和衍射光学元件(DOE)的可重构同轴单光子激光雷达三维成像系统。
这一系统采用DOE将出射光束整形为32×32的点阵照明模式,并使得DOE点阵光束的总发散角与SPAD阵列的总FOV严格匹配,同时DOE调制的子光束分别与SPAD阵列探测器的每个光敏面精确匹配,从而实现了对系统照明激光的高效利用。与泛光照明相比,该单光子激光雷达三维成像系统的能量利用率提高了约100倍。
同时,该系统还兼容亚像素扫描,能够获取更高分辨率的图像,实现了3倍横向空间分辨率提升。
其相关研究成果发表于新出版的《应用光学》(Applied Optics)和《IEEE光子学杂志》(IEEE Photonics Journal),并被Applied Optics遴选为Editor's Pick(编辑精选)亮点文章。

望远镜可重配置共轴SPAD阵列激光雷达系统及三维成像实验结果。
两篇论文的第一作者为中国科学院西安光机所薛瑞凯博士,通讯作者均为西安光机所康岩助理研究员和张同意研究员。
此外,该研究团队还提出了一种基于多重频激光照明结合脉冲串相关累积的新型单光子雷达测距方法,可将原本由最小单重频决定的18.75m无模糊距离提升至7.4km。
张同意研究员团队与王国玺研究员还带领超表面研究小组合作提出一种通过单层超表面生成共轭拓扑涡旋光束的紧凑型转速测量方法,从而实现了旋转目标转速的精确测量。
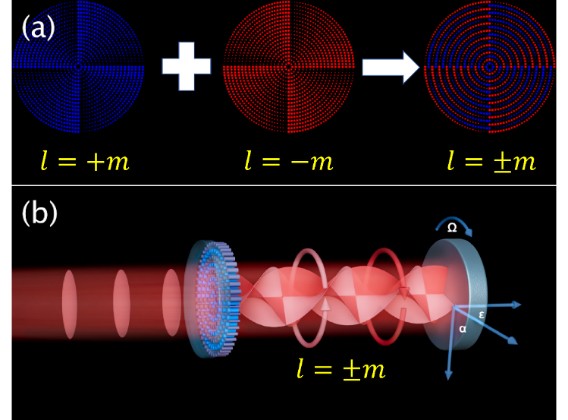
组合超表面示意图以及基于组合超表面的转速检测过程示意图。图片均由论文作者提供
在高光子通量下如何修正由死时间引起的直方图畸变和准确估计目标距离一直是单光子激光雷达研究的难点。针对这一难题,该研究团队此前还提出了基于系统前向模型的参数估计堆积效应校正公式,可显著提升目标深度和反射率的估计精度;以及提出了一种基于经验误差的堆积效应修正方法。这些成果均发表于《光学快报》(Optics Letters)上。
文章相关信息:https://doi.org/10.1364/AO.493000;
https://10.1109/JPHOT.2021.3103817;
https://doi.org/10.1364/OL.511411;
https://doi.org/10.1364/OL.554478;
https://doi.org/10.3390/photonics10121304;?
https://doi.org/10.1364/OL.551979
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






