在国家重点研发计划、国家自然科学基金等项目资助下,广东省科学院智能制造研究所机器人技术团队创新地提出基于概率度量的物体级同步定位与地图构建方法(PMO-SLAM)。相关成果近日发表于《IEEE-ASME机电一体化汇刊》(IEEE/ASME Transactions on Mechatronics)。
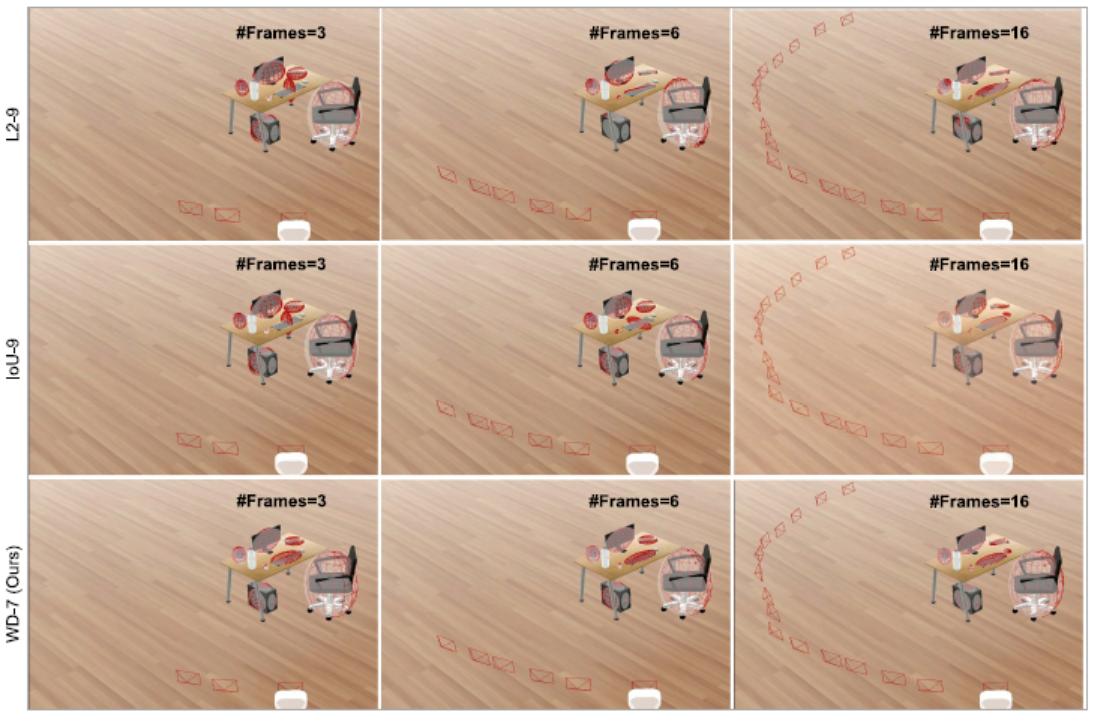 椭球体增量优化对比图。研究团队供图,下同
椭球体增量优化对比图。研究团队供图,下同
?
SLAM(Simultaneous Localization and Mapping,同步定位与地图构建)作为机器人领域核心技术,广泛应用于自主移动、自动驾驶及无人机等领域。当前研究重点正转向环境语义信息的深度感知与建模,旨在提升机器人环境认知能力,支撑复杂环境交互任务。其中,物体实例的语义、几何及物理属性建模,对机器人实现自然语言指令解析、任务规划、物体操控及场景描述等关键功能至关重要。
论文通讯作者、广东省科学院智能制造研究所研究员周雪峰指出,在物体几何建模方法中,对偶二次包络椭球因参数紧凑、理论成熟被广泛应用,但在实际机器人应用中,受限于运动模式、观测视角及重复观测不足,单目视觉下的物体级语义地图构建面临挑战。
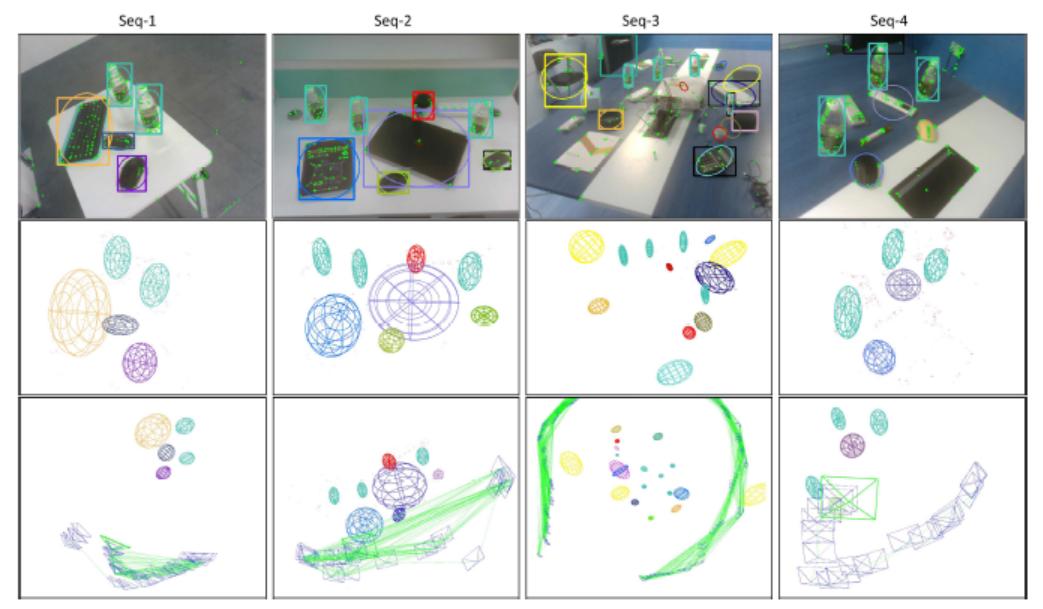 真实环境实验结果(第一行:四种不同场景;第二行:构建对应的椭球体;第三行:各环境下的机器人运动轨迹)。
真实环境实验结果(第一行:四种不同场景;第二行:构建对应的椭球体;第三行:各环境下的机器人运动轨迹)。
?
为此,研究团队提出PMO-SLAM方法,通过构建显式7自由度对偶椭球参数化模型,降低优化维度并提升初始化效率;同时,引入基于Wasserstein概率度量的观测与误差模型,强化多视图观测对物体包络估计的约束,加速物体地图增量优化收敛,显著提升地图构建精度。
仿真、公开数据集及真实环境实验表明,PMO-SLAM在收敛速度与受限视角下的估计精度上显著优于传统几何度量方法,有效解决了传统方法的度量歧义问题,为构建鲁棒、高效的物体级SLAM系统提供了新思路。
相关论文信息:https://doi.org/10.1109/TMECH.2025.3592707
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






