日前,哈尔滨工业大学深圳校区机电工程与自动化学院教授李兵、李曜团队在微小型机器人领域取得新进展,相关成果发表于《先进科学》。
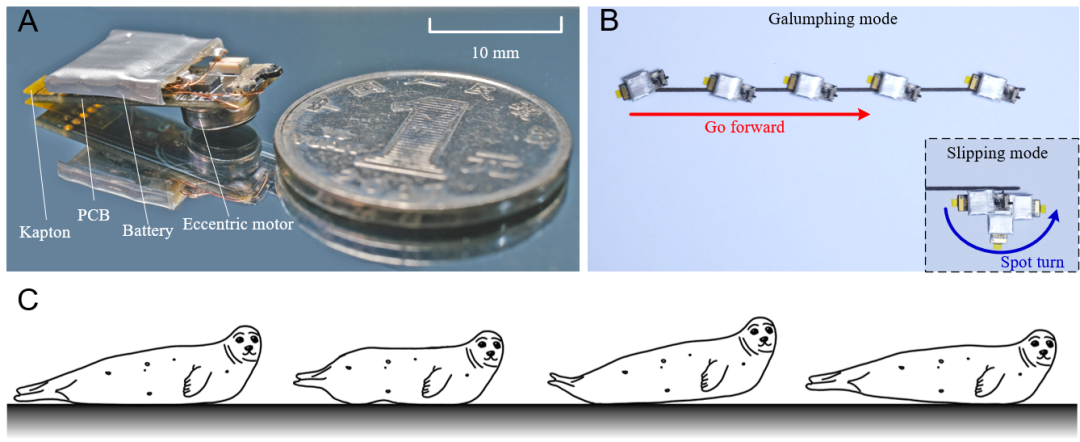
在微型机器人领域,简化驱动形式和减少驱动器数量是一大难题,因为驱动器是限制机器人尺寸的关键因素。为了突破这一瓶颈,李兵、李曜团队探索了一种全新的驱动方法,其灵感来源于海豹的踱步跳动方式。这种方法能够使仅采用单一电机的刚体机器人在欠驱动条件下实现直行、弧行、转向等灵活运动,为单电机驱动移动机器人的设计提供了全新思路。
单电机驱动移动机器人 科研团队供图
现有的微型机器人大多依靠集成多个执行器来确保灵活性,但系统的复杂度限制了其进一步微型化。如果只采用一个执行器的机器人,虽然结构简单,却在平面运动的灵活性和精度方面存在严重不足。
为解决这一问题,研究团队引入了“偏心力驱动的多方向运动传递(ERDMT)”的新技术,该技术仅利用一个倾斜的偏心电机和一个双腿结构就实现了灵活的平面运动。基于ERDMT技术的机器人仅需4个零件,便可以灵活自如地实现复杂的运动轨迹。
基于此,该研究人员提出了一种基于偏心旋转的“踱步跳跃”传动技术。该技术能够在特定转速范围内,使系统稳定地实现微观尺度(30至400微米)的踱步跳跃运动,并实现了单电机偏心旋转驱动下的直行运动,为微型机器人平面运动驱动提供了一种更直接、更简洁的途径。
此外,研究还发现,只需改变驱动电压来调节电机产生的偏心转速,即可控制机器人形成不同的宏观轨迹。
基于该驱动原理,团队研制出了一款名为GASR的微型爬行机器人,其重量仅为1.2克。得益于其稳定、精确的运动性能,GASR即使在没有反馈控制的情况下,也能够灵活地穿行于各种障碍物。
相关论文信息:https://doi.org/10.1002/advs.202307738
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。