近日,中国科学院上海微系统与信息技术研究所仿生视觉系统实验室研究员李嘉茂团队与合作者,在智能驾驶感知领域的栅格占据预测和全景分割方面取得新突破,两项成果均被ICRA录用。
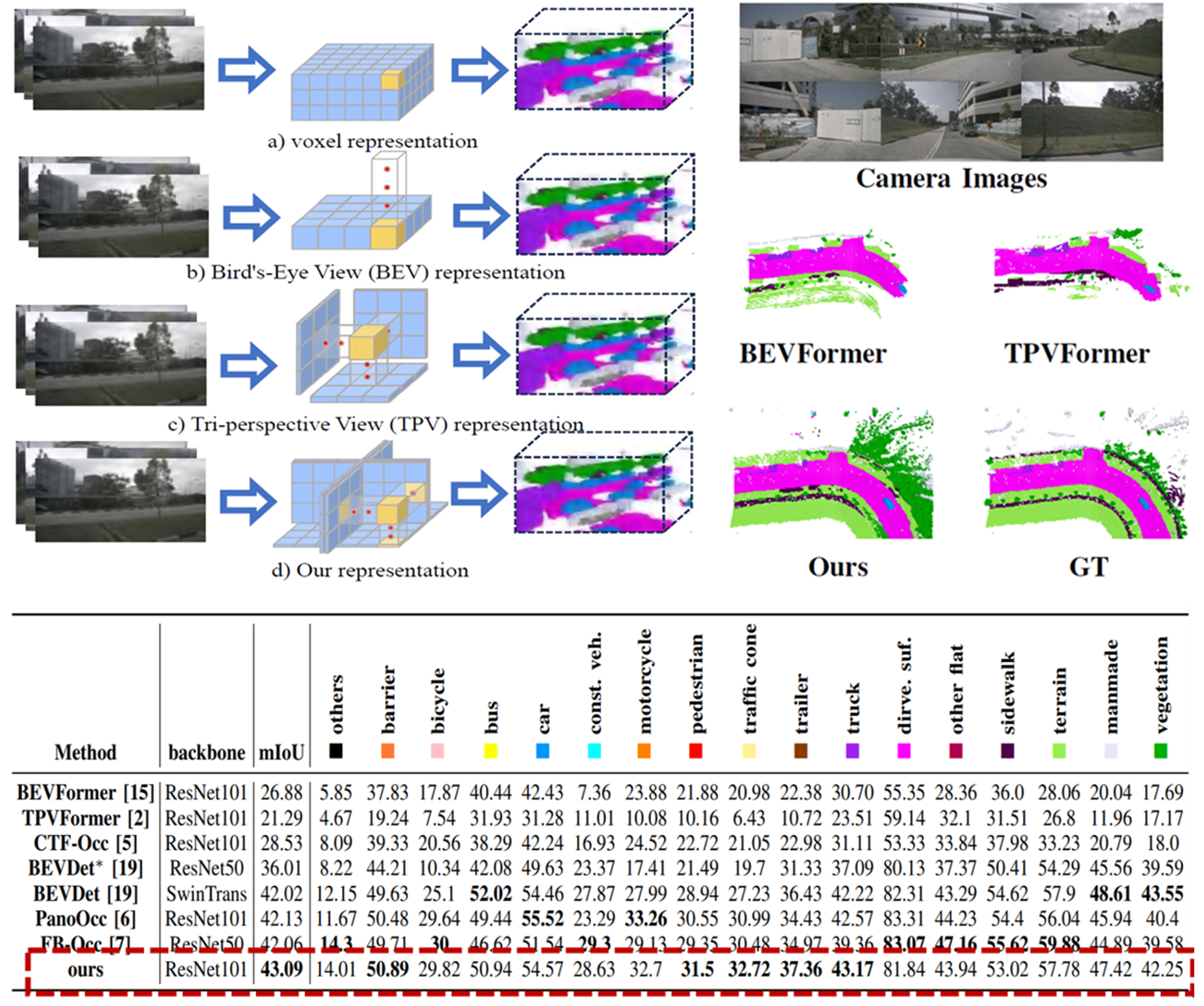
针对栅格占据预测问题,研究团队在基线算法(TPVFormer)的基础上,提出了一种以自车为中心的环视视角的占据预测表征方法CVFormer。该方法以汽车全景环视多视图为输入,以环绕车辆的二维正交视角来表征三维场景,有效实现了细粒度三维场景表征,并克服了车体周身障碍物的视角遮挡问题。研究团队将该方法在驾驶场景占据预测权威评测数据集nuScenes上进行了验证,发现在预测精度上明显优于现有算法,并将计算复杂度显著降低,展现了较强的可部署性。此外,该方法已在智能驾驶感知系统上完成了测试验证。
栅格占据预测CVFormer在nuScenes数据集上达到最优性能
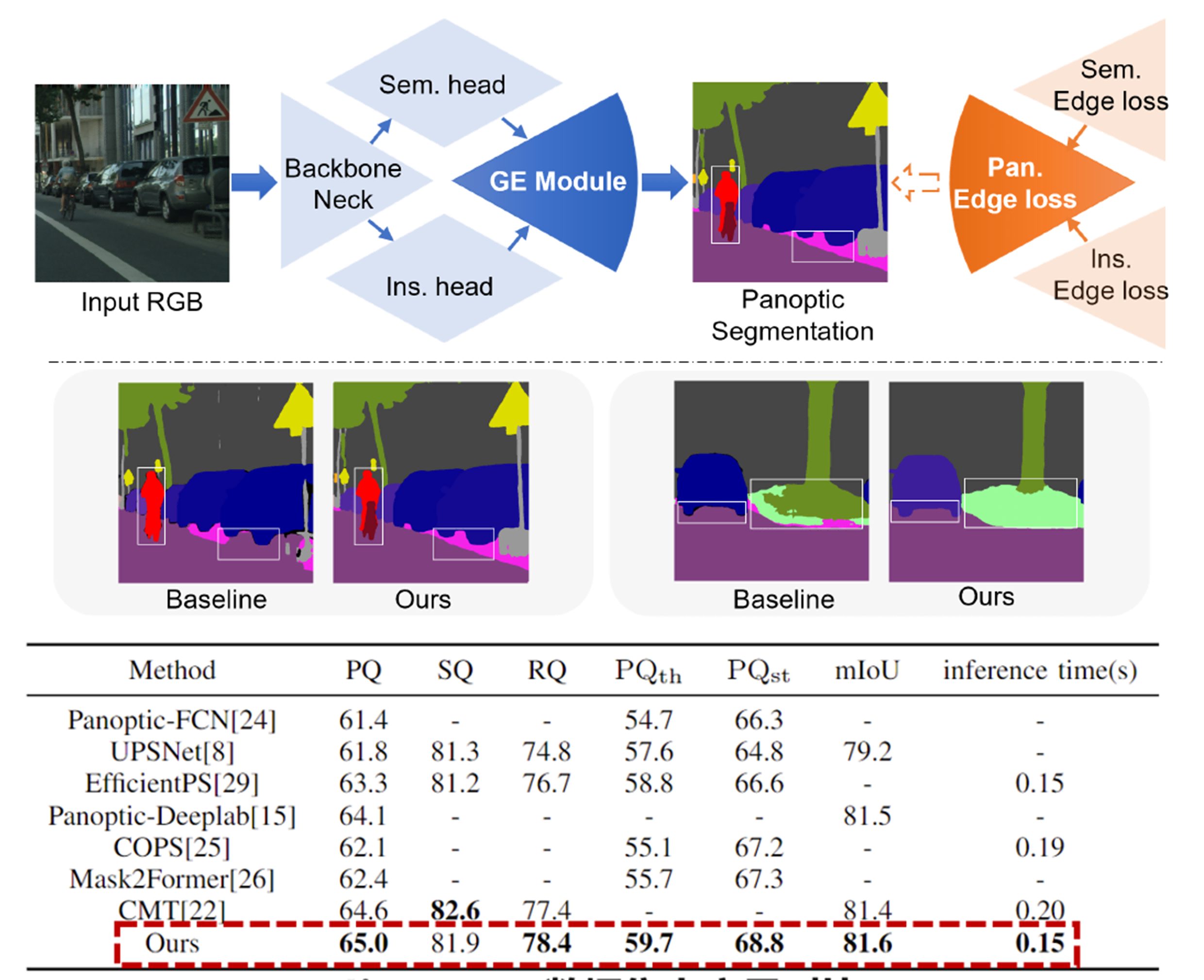
针对全景分割问题,团队设计了基于门控编码和边缘约束的端到端全景分割模型BEE-Net。该模型基于全局双向信息交互以及多角度边缘优化,有效缓解了全景分割中的语义-实例预测矛盾问题与边缘分割挑战。该方法在驾驶场景分割权威数据集CityScapes上完成了验证,在精度上超越了现有基于CNN的全景分割模型,同时在效率上优于所有基于Transformer的全景分割模型。此外,该方法兼顾了分割精度与效率的性能需求,已在智能驾驶感知系统上完成了测试验证。
在CityScapes数据集上BEE-Net达到基于CNN的全景分割模型最优性能 图片均来源于微系统所
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。