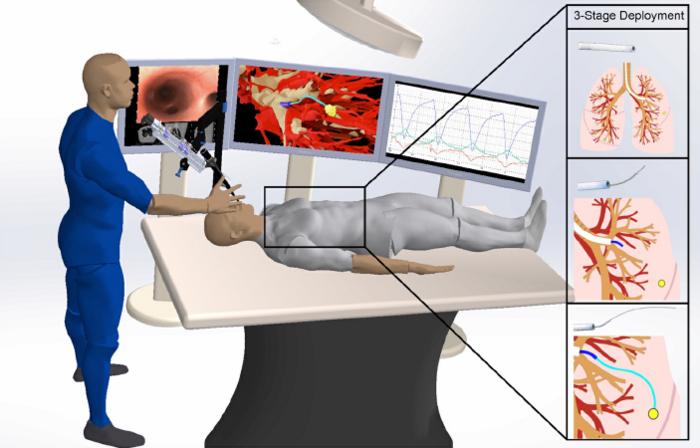
半自主医疗机器人肺部的3个阶段。图片来源:KUNTZ等人/北卡罗来纳大学
科技日报记者 张梦然
有些肿瘤非常小,隐藏在肺组织深处,医生很难触及它们。为应对这一挑战,美国北卡罗来纳大学教堂山分校和范德比尔特大学研究人员一直在研究一种能穿越肺组织的极其柔韧但坚固的机器人。他们在《科学·机器人》杂志上最新发表的一篇论文中,展现了新机器人可自主地从“A点”出发到达“B点”,同时避开活体实验室模型中的重要结构,例如微小气道和血管。
研究人员称,这项技术能够达到机器人支气管镜无法达到的目标。它会多给出额外的几厘米甚至几毫米的距离,这对于追踪肺部的小目标有很大帮助。
该机器人由几个独立的组件组成。机械控制组件的原理是利用一种针,针向前和向后提供受控推力,并且针设计允许沿着弯曲路径转向。该针由镍钛合金制成,经过激光蚀刻以增加其灵活性,使其能轻松地穿过组织。
当它向前移动时,针上的蚀刻使其能够轻松绕过障碍物。导管等其他附件可与针一起使用来执行肺活检等程序。
为了穿过组织,针需要知道它要去哪里。研究团队利用受试者胸腔的CT扫描和人工智能创建了肺部的三维模型,包括气道、血管和选定的目标。使用这个3D模型,一旦针向靶标出发,人工智能驱动软件就会指示它自动从“A点”移动到“B点”,同时避开重要的结构。
研究人员称,它类似于自动驾驶汽车,但它可通过肺组织进行导航,在到达目的地时避开重要血管等障碍物。
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。