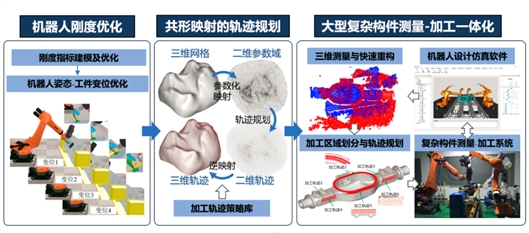
复杂构件加工的机器人轨迹规划及刚度优化。研究团队 供图
大型复杂构件机器人化加工是我国建设制造强国的必由之路。记者从广东省科学院智能制造研究所获悉,该所机器人技术团队在大型复杂构件机器人化制造研究取得进展,自主研发了具备点云融合、快速重构、工艺规划及离线编程的机器人设计仿真软件和测量加工一体化系统,实现高性能的大型复杂构件机器人化制造。相关研究成果日前荣获第三届中国机器人学术年会最佳海报奖。
据介绍,第三届中国机器人学术年会收录并展出海报近200份,历经专家推荐、评委投票等多轮评审和激烈角逐,最终评选出10份最佳海报奖,以表彰我国机器人领域优秀的研究成果。其中,广东省科学院智能制造研究所廖昭洋博士等完成的《复杂构件加工的机器人轨迹规划及刚度优化》海报脱颖而出,获得年会最佳海报奖。
大型复杂构件广泛存在于高端装备的核心零件中,如大型风电叶片、高铁车身、船用螺旋桨等,是新能源、海洋、航空航天、轨道交通等领域重大装备的关键件和基础构件,其制造水平是衡量国家工业发展水平和综合国力的重要标志。工业机器人在大型复杂构件制造中具有配置灵活、兼容外部传感、灵活性高等优点,使机器人成为“能工巧匠”,给大型复杂构件加工提供了精度更高、成本更低、柔性更好的替代方案,具有巨大发展潜力。
《复杂构件加工的机器人轨迹规划及刚度优化》海报第一完成人廖昭洋博士及团队,针对大型复杂构件机器人化高质量加工的需求,重点开展了面向刚度强化的机器人姿态及工件变位优化方法、基于网格参数化映射的轨迹规划方法、基于点云融合和逆向重建的三维测量等技术研究,结合自主研发的机器人设计仿真软件和测量加工一体化系统,形成了完整的复杂构件机器人化制造技术方案,对我国机器人和高端装备产业发展具有重要促进作用。
据了解,针对大型复杂构件机器人切削加工中加工精度低、轨迹规划难等问题,研究团队建立了面向切削变形的刚度评价模型,提出了面向刚度强化的机器人姿态-工件变位联合优化方法,提升机器人切削过程的刚度及加工精度;同时提出了基于共形映射的轨迹规划方法,将复杂的三维轨迹规划任务降维至二维参数域。并结合基于谱聚类的区域分割、基于像素法的切削力优化、以及基于GPU渲染管线的高效无碰规划等技术,提出了适应复杂构件铣削、抛磨等多工艺的轨迹策略。
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






