近日,江南大学物联网工程学院教授樊启高科研团队提出了一种基于扩展状态观测器(ESO)的鲁棒控制方法,他们将系统参数的不确定性和外界环境干扰视为总扰动并通过设计的ESO观测得到,将滑模控制与扰动补偿策略相结合,设计了一种路径跟踪控制器,以消除系统的总扰动并实现微型机器人的精确路径跟踪控制。
研究成果发表在中国科技期刊卓越行动计划高起点新刊《类生命系统》(Cyborg and Bionic Systems)上。
微型机器人有许多驱动方法。其中,基于磁场的驱动方法相比于光驱、电驱等驱动方式,基本不会对生物体产生伤害,因此这种磁性微型机器人被广泛应用于生物医学领域,如靶向给药、细胞微操作、血管疏通等。研发团队将研究目标锁定磁场驱动方式,并针对一种梯度磁场驱动系统开展磁性微型机器人的运动控制研究。
研究团队针对微型机器人路径跟踪控制过程中的扰动问题,通过构建ESO来观测得到微型机器人的实时位置,通过设计一种结合滑模控制和扰动补偿的控制器来消除总扰动并抑制跟踪误差,从而保证路径跟踪的鲁棒性。简单来说,就是在传统微型机器人的一般路径跟踪模式上,添加团队设计的ESO和滑模控制器,使得微型机器人运动更加“丝滑”。
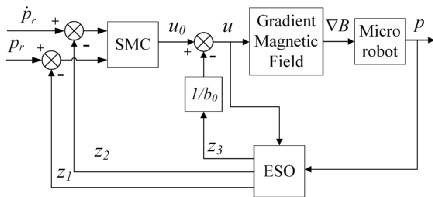
微型机器人的鲁棒控制。江南大学供图
为了验证所提控制方法的有效性,研发团队在电磁驱动系统中对磁性微型机器人进行了路径跟踪控制实验。研发团队在模拟血管结构中设定了三种不同的实验路径,为了突显跟踪效果,将提出的控制方法与传统PID控制做了对比。
实验结果表明,研发团队所提出的控制方法能够成功地实现微型机器人的路径跟踪控制,与传统PID控制方法相比,表现出更好的跟踪性能。该方法对复杂环境中的未知干扰和系统参数的不确定性具有较强的鲁棒性。
相关论文信息:https://spj.sciencemag.org/journals/cbsystems/aip/9835014/
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。