
今年6月,泰坦号观光艇失联,五名富豪乘客葬身海底,这也让水域分析、水下定位与水下救援成为全球关注的话题。
近日,来自美国伊利诺伊大学香槟分校(UIUC)的Viktor Gruev教授与David Forsyth教授团队合作,提出了一种基于偏振光学的水下定位方案,首次实现了全天候的水下地理定位。该文章以“Polarization-Based Underwater Geolocalization with Deep Learning”为题发表在卓越行动计划高起点新刊eLight。
该工作通过偏振光学成像追踪太阳位置,以确定水下位置,同时基于上千万张偏振敏感的全球真实水域图片进行深度学习训练,首次实现了在公海、清水或是低能见度水域等不同环境下的全天候水下定位。作者认为,一旦确定了水下地理位置,人类就有望利用该信息进行自主水下导航,更深入的理解水下世界。对于该重大突破,UIUC联合EurekAlert、ScienMag、Tech Xplore等多家媒体联合发布了工作解析视频。
地球水域是一个高度复杂的动态环境,对人类的生存与发展具有极其重要的意义。然而,对水域的现场监测仍然面临着诸多挑战。水下采样机器人为准确的监测效果,但主要挑战之一来源于水下地理定位技术的缺乏,因为我们熟知的GPS导航信号无法穿透水面,尽管声学导航可以为水下定位提供一定方案,但其仅能在非常有限的覆盖范围内工作,而且精度较差。
据此,受“许多动物通过感知天空或水中的偏振敏感信息以帮助其迁徙”这一自然现象启发,很久之前,研究人员们就提出,从水下观看时,天空中的偏振模式在清澈浅水中的斯涅耳窗(Snell window)内是可见的,或许可用于地理定位和导航。然而,很长时间内,研究人员都认为水下光主要是水平偏振的,因此不适合地理定位,直到20世纪后才发现并不正确。在2018年,本文作者Gruev教授在清水域中使用偏振成像实现了精度为1970公里的水下地理定位,文章发表于Science Advances。
但是,在夜间或是在全球广泛存在的低能见度浑水域中,仍旧无法实现水下地理定位。这来自于两大主要挑战:1)浑水中的偏振被认为是水平的;2)没有夜间水下偏振模式的观测记录。因此,如果能够实现复杂水域(浑水和夜间水域)的水下地理定位,无疑对全球水域研究具有极其重要的意义和现实价值。
在散射系数较低(0.001 m-1)的开阔海域或低营养淡水中,水下偏振模式可以通过单一散射模型准确表示,但对于散射系数较高的水域、夜间水域,基于散射模型的水下地理定位方法就变得不可行。在本研究中,研究团队表明了低能见度水域中的日光以及高能见度和低能见度水域中的夜光产生的偏振模式可以实现准确的地理定位。
首先,研究团队使用能够记录全球四个地点的径向偏振光场的水下摄像机收集了约1000万张实际图像,组成了用于训练的数据集。然后,该团队训练了一个深度神经网络,根据全向镜头收集的水下偏振角 (AoP) 图像,结合相机位置传感器数据来预测地理位置(图一)。研究团队采用了RI-ResNet(rotation-invariant ResNet)深度神经网络结构,并加入了RDM架构(recurrent denoising module),使得该方案能够建立起水下偏振模式的时空联系。研究团队将该模型与参数驱动模型进行了跨时间、日期以及不同能见度水域下的水下地理定位精度的全方位比较(图三)。结果显示,使用偏振信息而不是仅强度图像可以在较为复杂的水域中实现优越的地理定位精度(图四,图五)。
这一研究成果为水下地理定位技术的进一步发展开辟了更广阔的研究前景,同时也为全球范围内的水域研究提供了一种新的有效途径,对后续其他相关领域的研究具有极其重要的价值。

图一:白天和夜间,低能见度和高能见度水域中,基于天基水下偏振信息的深度神经网络水下地理定位方法。 (a)-(c) 我们在高能见度和低能见度水域部署了带有全向镜头的水下偏振敏感成像系统,以收集所需的数据。每张图旁边都显示了测量的偏振角 (AoP,angle of polarization) 的伪彩色图像以及将观察到的AoP与参数模型预测进行比较的图表。可以看出参数模型的预测在低能见度水域中不可靠,并且在夜间无效。(d) 我们选择了全球地图上所示的四个不同地点来收集水下数据并评估我们地理定位方法的有效性。(e) 我们的深度神经网络与粒子滤波器结合使用AoP图像序列来估计相机的位置纬度和经度。
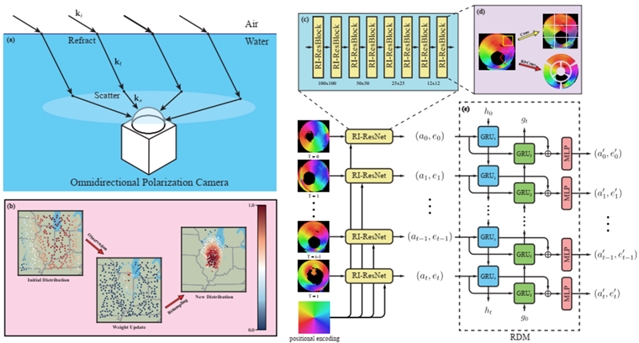
图二:(a)水下偏振模式主要是由光在空气-水界面之间的折射和水介质内的散射产生的。这些模式可以使用穆勒矩阵(Mueller matrices)进行数学建模。(b) 粒子滤波器 (PF, particle filter) 通道以红色显示高概率粒子,以蓝色显示低概率粒子。(c,d) 我们提出的网络模型包括RI-ResNet(rotation-invariant ResNet) 架构,该架构用RI卷积层对应地替换每个卷积层,并考虑全向图像中的径向空间结构。(e) RDM(recurrent denoising module)架构涉及一个双向循环网络,用于对图像之间的时间依赖性进行建模。

图三:在低能见度和高能见度水域进行全天时的地理定位。顶行((a)和(b))和底行((c)和(d))分别显示了使用参数模型和深度神经网络模型的地理定位精度,左列和右列分别表示了高能见度和低能见度水域。由于参数模型在纳入导致水下偏振的所有物理因素的建模上存在缺陷,因此基于参数的水下地理定位在低能见度水域中的精度为中等到低。相比之下,深度神经网络地理定位在高能见度和低能见度水域全天都表现良好。各个地图分别显示中午和一天结束时地理位置的粒子滤波器估计的协方差的平均值(三角形和菱形)和第一标准偏差(实线和虚线)。箱线图代表南北(紫色)和东西(橙色)地理定位预测误差的中位数和上/下四分位数。

图四:北马其顿奥赫里德湖50 m深度的水下地理定位数据。50 m深度处,几个小时内得到的(a)太阳角误差和(b)地理定位误差。

图五:不同月相下夜间的地理定位精度。 (a) 全球地图显示新月和满月阶段四个站点(十字符号)地理位置的粒子滤波器估计的平均值(由菱形表示)和第一标准差(由实线表示)。(b) 箱线图表示南北(紫色)和东西(橙色)地理定位预测误差的中位数和上/下四分位数。(来源:中国光学微信公众号)
相关论文信息:https://doi.org/10.1186/s43593-023-00050-6
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






