|
|
|
|
|
从蛛网觅灵感!新型仿生水凝胶传感器开启具身交互新时代 |
|
|
人工智能浪潮之下,传统触屏、语音、视觉交互方式的短板日益凸显,柔性穿戴传感技术作为下一代人机交互的核心载体,凭借贴合人体、感知灵敏的优势备受关注,而水凝胶因类皮肤特性、优异生物相容性,成为柔性压阻传感器的理想材料。
近日,中国科学院兰州化学物理研究所润滑材料全国重点实验室功能润滑材料课题组联合多家单位开展跨领域协同攻关,创新融合类芬顿反应与光固化3D打印技术,成功研制出高性能石墨烯-铁离子动态配位海藻酸钠-聚丙烯酰胺水凝胶材料,并依托蜘蛛捕猎仿生原理设计十字形传感贴片,打造出低约束、高精度的新型具身人机交互系统。相关论文发表于《先进功能材料》。
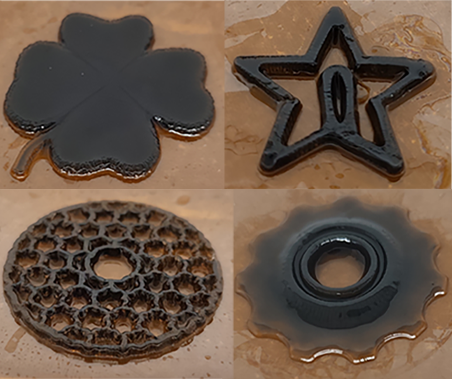 光固化3D打印不同结构的GFSP水凝胶。兰州化物所供图。
光固化3D打印不同结构的GFSP水凝胶。兰州化物所供图。
另辟蹊径构建全新材料体系
在智能穿戴、医疗康复、工业远程操控等场景中,柔性水凝胶传感器拥有十分广阔的应用前景。
但长期以来,高性能双交联水凝胶光固化3D打印制造存在诸多技术壁垒,一方面传统制备工艺导致材料机械柔顺性与传感性能无法同步提升,另一方面高密度传感阵列带来穿戴束缚、舒适度下降等问题,两大难题严重制约着柔性穿戴传感领域的产业化进程。
“目前主流的高性能双交联水凝胶普遍采用‘一釜两步’制备工艺,这套流程应用到光固化3D打印时会暴露出明显缺陷。”中国科学院兰州化学物理研究所研究员王金清向记者细数了当下行业面临的两大核心技术难题。
据了解,为保障打印结构完整,工艺会被迫提高初始共价交联密度,让水凝胶变硬,失去类皮肤的柔软特质。同时石墨烯等主流导电填料具备吸光特性,会抑制光聚合反应,这就导致我们要么舍弃导电填料牺牲传感性能,要么放弃打印精度,机械柔顺性和传感性能始终处于对立状态。
除了材料本身的矛盾,传统传感阵列的布设模式也让穿戴体验陷入僵局。王金清表示,人体关节运动复杂多变,需要多维度信号采集,行业内普遍采用高密度传感阵列来补足感知维度。
但大量传感单元与线路叠加在穿戴设备上,不仅会增加机械约束和穿戴负荷,限制人体正常生理活动,密集布线还容易引发信号串扰,提升硬件成本与数据分析难度,舒适性、实用性与信号稳定性难以兼顾。
两大痛点叠加,让优质柔性水凝胶传感器迟迟无法走出实验室。
面对行业共性难题,团队没有沿用传统改良配方、优化设备的常规思路,而是从化学反应机理入手大胆创新。研究团队以异丙苯基二茂铁六氟锑酸盐作为光引发剂,将类芬顿反应与光固化3D打印技术深度结合,构建起同步触发自由基与阳离子双重光聚合反应的全新机制。
谈及技术创新思路,王金清介绍,紫外光照射下,光引发剂会释放亚铁离子,亚铁离子与体系内过硫酸盐发生类芬顿反应,生成三价铁离子与高活性自由基,分别启动阳离子聚合与自由基聚合,两大聚合反应同步进行,一次性完成水凝胶双重交联固化。
一方面,水凝胶得以保留优异的机械柔顺性。另一方面,有效解决了导电填料吸光抑制聚合的问题。依托该技术,团队成功制备出GFSP 系列水凝胶材料,各项核心性能参数均实现跨越式突破。
据测试数据显示,这款新型水凝胶拉伸强度达54.19kPa,电导率达到 0.92S/m,压力灵敏度高达 1.582 kPa-1,能够精准检测低至0.01% 的微小应变,足以捕捉人体皮肤、肌腱产生的细微形变。
在动态响应性能上,材料响应时间仅14.22ms,恢复时间为 21.56ms,毫秒级的反应速度可实现人机交互实时联动,完全满足沉浸式交互的使用需求。
“我们终于实现了水凝胶可打印性、机械柔顺性与传感功能性三者的协同优化,从材料根源上解开了行业多年的死结。”王金清说道。
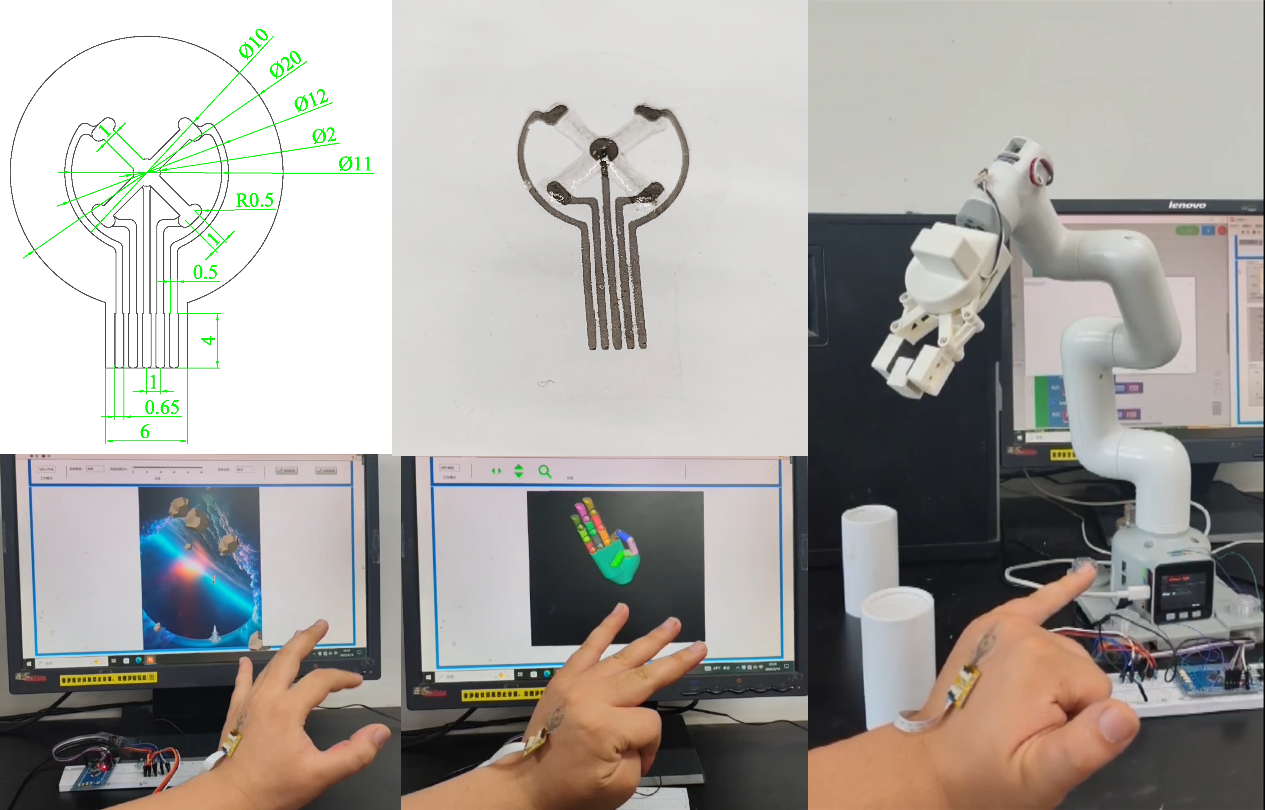 LCWHSP结构、尺寸及示范应用。兰州化物所供图。
LCWHSP结构、尺寸及示范应用。兰州化物所供图。
仿生巧思赋能结构革新
解决材料难题后,团队将目光投向传感器结构设计,力求摆脱高密度阵列的束缚,在轻量化、低约束的前提下保证信号采集的完整性。
而自然界的生物特征往往是科技创新的灵感来源,本次研究的仿生设计灵感便源自蜘蛛依靠蛛网远程感知猎物振动的生存机制。
“蜘蛛依靠蛛网传递振动信号,即便猎物距离较远,也能精准判断位置与状态。人体皮肤和人体筋膜、肌腱同样具备力学传递能力,关节运动产生的形变可以传递到手臂、手背等非关节区域。”王金清解释道,基于这一思路,团队提出低约束穿戴式仿生传感策略,摒弃将传感器密集贴附在关节处的传统方案,转而设计可布置在平坦皮肤区域的感知单元,利用人体自身组织传递力学信号。
经过多轮仿真模拟与实物测试,团队最终选定十字形结构打造LCWHSP (低约束可穿戴水凝胶传感贴片)。十字形是多维力传感器领域的经典构型,四个传感臂可分别响应不同方向的应变信号,团队将这一结构移植到柔性水凝胶体系中,赋予单片传感器单点多维感知能力。
使用者只需将十字形贴片贴在手背、前臂、小腿等远离关节的平坦部位,当手腕、手肘、膝盖等关节活动时,关节产生的拉伸、扭转、挤压等多维力学信号,会通过肌腱、筋膜和软组织传导至贴片位置。十字形的四个感应臂独立采集不同维度的应变数据,经过算法解析后,就能完整还原人体运动状态。
相较于传统高密度传感阵列,十字形仿生结构的优势十分突出。王金清表示,单点多维感知模式让传感器数量减少80%以上(以手势感知为例),繁琐的布线、多通道信号采集模块也随之精简,从物理层面消除了穿戴笨重、线路缠绕的问题。
同时,贴片不再贴合关节折痕处,肢体活动时不会受到摩擦、拉扯与限制,搭配全柔性材料与厚度仅0.02mm 的超薄柔性基底、电极,实现了真正的 “无感佩戴”。此外,该贴片结构简单,用户可自行粘贴、反复使用,大幅降低使用门槛与应用成本,兼顾了实用性与经济性。
不少人会产生疑问:传感器远离关节、数量大幅减少,会不会造成信号缺失、精度下降?对此王金清给出了明确答案。他表示,GFSP 水凝胶超高的灵敏度、极低的检测下限,搭配水凝胶材料本身优异的贴肤粘附性,即便贴片布置在非关节区域,也能精准捕捉传递而来的微弱应变信号。全柔性设计不会阻碍皮肤自然形变,最大程度保证了信号的真实性与完整性。材料、结构、工艺三者协同发力,最终实现了穿戴舒适性与传感精度的双向兼顾。
依托GFSP 水凝胶材料与十字形仿生贴片,团队进一步整合信号采集软硬件、深度学习智能分析模型以及多场景应用模块,搭建起一套完整的具身人机交互系统。经过大量样本测试,该系统对静态手势、动态连续手势的识别准确率达到 98.60%,在同类型柔性传感人机交互系统中处于先进水平。在实际演示中,使用者仅凭手部简单手势,就能流畅操控虚拟游戏界面中的角色躲避障碍、发射指令,也可远程操控智能机械臂完成抓取、抬升、旋转等精细化作业,交互过程实时、稳定、精准,充分验证了技术的落地价值。
除此之外,凭借捕捉关节微摩擦、微弱振动的超强能力,这款传感器还延伸出多元应用潜力。在骨关节炎早期筛查、术后康复监测、运动损伤预警等医疗健康领域发挥重要作用,为居家健康监测、个性化康复训练提供全新技术方案。
助力具身交互技术走向大众
从化学反应机理创新,到仿生结构设计,再到整套交互系统搭建,该项目历经近四年持续攻关,是材料化学、力学、电子工程、生物医学工程、软件工程等多学科深度交叉融合的成果。
王金清坦言,研发之路充满挑战,初期团队尝试传统两步法工艺时,频繁出现打印结构残留、材料硬化、导电填料导致固化失败等问题,数十种配方、工艺参数反复调试都收效甚微。
“当我们第一次利用新体系,成功打印出完整的石墨烯复合水凝胶时,所有人都备受鼓舞,那一刻我们知道,方向走对了。”王金清说,而当十字形贴片顺利采集到手势信号、精准控制外部设备时,大家真切感受到,实验室里的化学反应,真正落地为改变交互方式的实用技术。
当前,该技术已完成核心原理验证、样机测试,并申报多项发明专利与软件著作权,构建起初步的知识产权体系,整体处于从实验室研发向产业化过渡的关键阶段。
谈及后续规划,王金清介绍,团队将聚焦三大短板持续迭代优化。首先是优化制备工艺,开展严苛环境下的老化测试与材料改性,提升产品批次一致性、长期服役稳定性与使用寿命,满足产业化量产要求。
其次是升级智能算法,搭建覆盖不同人群、不同使用状态的传感数据库,优化深度学习模型,提升相似动作、精细动作的识别能力,强化系统跨人群、跨场景的泛化能力。
最后是完善硬件接口与通信协议,开发低功耗微型电路,实现与VR/AR 设备、机器人、智能家居等主流终端的无缝适配。
放眼未来3 至 5 年,团队计划优先推动技术在三大领域落地示范:一是工业领域,应用于无人机、工业机器人远程操控,赋能高危作业场景;二是医疗健康领域,落地运动监测、关节康复、心血管健康监测等民生场景;三是消费电子领域,结合 VR/AR 设备打造沉浸式交互体验。
王金清认为,柔性皮肤式电子、多模态隐式交互、具身智能闭环系统,将成为未来人机交互的核心发展方向。团队后续也将持续深耕研发自供能、自愈合、可降解的绿色高性能水凝胶材料,夯实材料基础。持续探索新型仿生低约束传感结构,进一步降低穿戴生理负担,搭建大规模多模态数据库与自适应算法,打造适配全场景的具身交互引擎。
相关论文链接:https://doi.org/10.1002/adfm.76031
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。