|
|
|
助力高危、有害岗位无人化替代 |
|
同济团队构建新能源汽车水泵柔性智能产线 |
|
|
近日,同济大学机械工程与机器人学院、自主智能机器人研究院的智能制造团队针对传统自动化产线设备通讯壁垒高、控制逻辑固化以及多机协同困难等行业痛点,成功构建了“大模型驱动的新能源汽车水泵柔性智能产线”。
团队提出了一种“宏观语义调度与微观视觉执行解耦”的控制架构,将大语言模型作为全局调度中枢,并以SAM3视觉基础模型为感知节点,实现了对多形态异构机器人的动态任务规划与精准执行,为未来柔性制造系统的搭建提供了一条全新的技术演进路线。
这项工作在算法决策、多机协同与系统架构三个维度实现了关键突破,具体体现在:
在算法决策层面,团队攻克了纯文本大模型的“视觉物理接地”难题,提出“调度大模型+SAM3”的双脑协同与视觉物理接地机制。在上层,调度大模型负责分析复杂任务,生成多机器人的协同过程树,并提炼出语义关键词;在下层,SAM3视觉基础模型接收到语义关键词后,零样本执行高精度的三维空间掩码分割与目标定位,从而赋予系统“语义理解+精准定位”的闭环反馈能力。
在多机协同层面,团队系统攻克了跨平台、跨形态机器人的统一调度难题,实现多形态异构机器人的无人化全局协同。产线集成并协同了人形机器人(负责重载搬运)、轮式双臂机器人(负责精细组装)、协作机械臂(负责设备操作)以及复合AGV(负责末端物流)。调度大模型根据这四类机器人的物理边界与硬件属性,建立动态任务分配机制,通过无线网络进行全局实时的任务分发与时序统筹,实现了整个流水线的无缝联动与高效协同。
在系统架构层面,团队打造了摆脱底层硬件强绑定的非侵入式控制系统。系统利用纯视觉反馈代替底层电信号读取,驱动机械臂像人类一样直接识别仪器屏幕状态,并执行物理按键操作。这一架构有效解耦了机器人调度系统与传统工艺设备底层的硬件绑定,极大地降低了老旧产线的改造成本与部署周期。
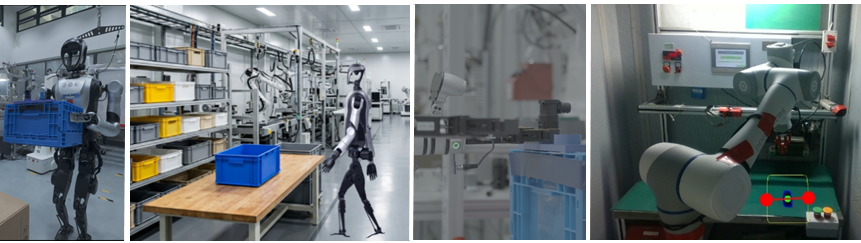 机器人基于纯视觉引导,完成非标散件的自主提取与精密组装。
机器人基于纯视觉引导,完成非标散件的自主提取与精密组装。
团队介绍,该柔性智能产线的成功运行,在学术研究与社会效益层面均具有重要意义。在科学价值上,该研究验证了“大语言模型+视觉基础模型”在长视野、多约束工业场景下的可落地性,填补了传统排产模型在“感知执行”层面的空白,为工业多机器人任务分配与调度优化提供了融合“数据驱动与视觉反馈”的新型解决方案。在社会价值上,该系统精准地将人类从高强度的重体力搬运,以及高噪、闷热的静音房声学测试等恶劣工况中替换出来,实现了高危、有害岗位的无人化替代,切实保障了劳动者的职业健康。
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。








